汽车正变得越来越自动化,未来的汽车不仅能检测道路上的障碍物和其他车辆,还能与它们进行通信,此时,就要用到”车辆对一切(V2X)”这一技术了。
作为一种通信技术,V2X使得车辆能够与环境中的各种元素包括其他车辆、行人、基础设施以及网络等交换数据。通过共享信息,V2X可大幅提高交通效率,提升车辆的安全性,减少碳排放,同时非常有助于启用高级驾驶员辅助系统(ADAS)和自动驾驶。
V2X:具有超视距能力的“传感器”
ADAS和自动驾驶技术通常依靠摄像头、雷达和激光雷达等传感器来检测车辆周围的情况,来自这些传感器的数据被发送到车载系统后,车载系统对数据进行处理并立即做出响应。此时,车辆可以实现比人类驾驶员更快地自动触发响应,例如加速或制动。虽然传统的感知传感器可以提供车辆周围360°视图,但仍然有局限性。 V2X是目前唯一一个具有“超视距”能力的“传感器”,它不仅可以“看到”障碍物后面,还可以在任何天气或照明条件下“看到”和操作。通过使用专用无线频谱,V2X使得汽车能够与环境中任何其他启用V2X的物体通信,其中包括车辆到基础设施(V2I)、车辆到行人(V2P)、车辆对车辆(V2V)、车辆到设备(V2D)、车辆到网络(V2N)和V2G(车辆到电网)。交换的信息如周围车辆的速度和位置数据,可帮助避免撞车事故的发生,缓解交通拥堵,甚至改善我们的生活环境。在本质上,C-V2X解决了基于感知传感器系统的缺点,为驾驶体验带来了第六感。 美国国家公路交通安全管理局(NHTSA)的预估数据是,V2X启用的安全应用程序可以消除或减轻高达80%的未受损车祸的严重程度,包括十字路口或变道时的车祸。因此,V2X技术每年可防止61.5万起车祸,挽救1,366人的生命。 V2X系统中极重要的部件是V2V和V2I。其中用于车辆之间数据交换的V2V通信允许车辆共享速度、位置和方向等信息,通过在车辆之间建立实时连接增强了态势感知,使它们能够检测潜在的碰撞,有助于预防事故、保持彼此的安全距离,同时有效改善交通流量和优化油耗。V2V还是ADAS和自动驾驶的重要组成部分,有了它,车辆能够做出明智的决策并积极应对路况。 V2I通信实现了车辆与各种基础设施元素之间的信息交互,如交通信号、路灯、嵌入道路的传感器、建筑物甚至行人或骑自行车的人。这种连接使得车辆能够及时接收重要信息,如红绿灯状态、速度限制、道路状况以及道路危险或施工区域的存在。通过整合这些数据,V2I可帮助减少拥堵,优化交通信号时间,提高整体交通效率。此外,V2I通信可以为ADAS和自动驾驶汽车提供有价值的输入,有助于更安全、更有效的导航。
V2X如何赋能智能出行?
V2X系统为车辆提供了整个城市环境的实时信息,包括基础设施、其他车辆、运输管理系统、导航源等,意味着驾驶员将被告知附近其他车辆的位置、速度和方向等实时信息,可随时收到有关交通事故或接近应急车辆的信息。配备了V2X系统的车辆,相当于为其创建了一个周围环境的实时地图。 在智能交通管理系统中,V2X技术非常有助于提高运输管理效率,减少拥堵。通过车辆与红绿灯、路标或其他智能交通系统之间的通信,V2X系统会通知驾驶员即将发生的交通堵塞,并为他们提供替代路线。这种环保驾驶还能有效减少燃油消耗和空气污染。如果发生道路交通事故,V2V通信系统将及时通知接近的车辆,提高了整体智能移动的质量和效率。 智能停车管理是智慧城市建设中的关键一环。V2X尤其是V2I对智能城市的智能停车管理具有重要意义,该技术将车辆和停车场连接起来,使停车场所有者和运营商更容易跟踪停车占用情况,驾驶员因此能实时了解有哪些停车位可用。 如今,V2X技术为我们展现了很多应用机会,其中包括乘客的车辆安全和弱势道路用户(VRU)(包括行人和骑自行车人)安全、地图、车辆定位以及支持自动驾驶汽车中人工智能的应用。在智能和互联汽车的单车感知中,不可避免地存在盲点或漏检,C-V2X路侧单元(RSU)提供的弯道、路口等车辆感知盲点的状态信息可有效扩展车辆的感知范围,提高了安全冗余度,增强了自动驾驶的决策能力。
V2X对ADAS和自动驾驶有何影响?
V2X技术将打开未来涉及公共安全和基础设施的许多应用之门,但V2X非常令人兴奋的应用当属ADAS。这两种技术均旨在通过降低碰撞的可能性和平滑交通流来提高道路安全和交通效率,只不过它们使用了不同的方法来实现目标。ADAS是基于使用摄像头、雷达和LiDAR来改善车辆对周围环境的感知,V2X则是基于通过车载单元(OBU)和路边单元(RSU)实时交换信息让车辆对环境有更细致和实时的了解。 自动驾驶是V2X可能产生较大影响的另一个领域。自动驾驶汽车中传感器的数量和复杂程度将随着自动驾驶水平的提高而不断增加。V2X作为一个额外的传感器,在所有天气条件下都能正常工作,获取新鲜的周边信息,甚至还可以穿过墙壁和障碍物,有效地解决了车辆的视线问题。目前,一些企业已经将V2X视为在车载单车智能中实现ADAS和自动驾驶有效的补充技术。
DSRC与C-V2X的技术路线之争
自车联网诞生以来,市场上一直存在两条技术路线之争,分别是基于无线局域网(WLAN)的和基于蜂窝的V2X技术。基于WLAN的V2X系统通过无线网络(Wi-Fi)连接车辆和基础设施,该技术就是DSRC(专用短程通信),也称为ITS-G5/8.11p、WLANp和Wi-Fi-p,于2010年获得批准。DSRC也是业界第一个可用的V2X技术,它目前在奥地利和德国的道路上有着广泛的部署。
C-V2X是由基于蜂窝调制解调器技术的3GPP标准定义的,该技术使用5.9GHz频带中的PC5接口在车辆、摩托车和路边单元(RSU)之间发送和接收消息。第一代C-V2X(版本14/15)称为LTE-V2X,第二代(版本16及更高版本)称为5G-V2X。随着2017年3GPP release 14规范中C-V2X的发布,基于蜂窝技术的V2X竞争优势开始显现。
C-V2X展现出的优势在于它提供了从4G LTE到5G NR的清晰演进路径:3GPP Release 14中包含的初始C-V2X标准专注于V2V通信和PC5的基本修改。进一步的3GPP版本可提供一系列的增强,用以支持更多的V2X操作场景,其中包括全套5G标准、多媒体优先服务、V2X应用层服务、5G卫星接入、5G中的局域网支持、5G的无线和有线融合、终端定位和定位等,以及支持弱势道路用户(VRU)携带的UE设备的更高功率效率。
在实际应用中,基于Wi-Fi的DSRC标准目前只有很少几家欧洲OEM的车型配备了有限数量的V2X模块。C-V2X明显获得了中国和美国的强有力支持,5G-V2X也有望在未来进入欧洲汽车市场,并逐渐成为DSRC的替代方案。
V2X商用离我们还有多远?
在过去的几年里,这个问题很难回答。截至2023年,理论上V2X技术已完全准备好实施和商业使用。该技术的可靠性和安全性在跨行业互操作性测试中得到了反复验证,很多路边设备现在都支持V2X,许多OEM已经为他们的车辆配备了V2X OBU。
欧洲经常被视为V2X技术和合作智能交通系统(C-ITS)的优秀试验平台,这不仅是因为欧洲大陆拥有世界上一些发达、维护完善的道路网络,还因为它们拥有数十家道路运输运营商,并且拥有集中的大批汽车OEM。在目前的欧洲市场,DSRC是事实上的V2X技术,市场活动也大多基于此。
目前,欧洲正在进入商用V2X部署的早期阶段,要想大规模运营V2X服务,还需要部署更多的OBU和RSU,这可能需要长达十余年的时间。很重要的一个原因是市场上的旧车保有量太大,这些车几乎没有升级到V2X的可能。此外,道路运营商也需要时间将RSU安装到路边设备中。
好消息是,欧洲新车评估计划Euro NCAP在其2025年发展路线图中宣布,从2024年开始,所有新车都必须配备V2X连接才能获得五星级安全评级,此举将有效激励OEM在其车辆中大规模部署V2X。作为早期采用者之一,大众汽车在高尔夫和欧洲销售的电动汽车系列等车型中加入了DSRC,每辆车均配备了V2X OBU。宝马近期宣布计划在其车辆中部署V2X技术,用于车辆到电网(V2G)双向充电。
C-V2X是中国、美国和欧洲未来极可能使用的V2X通信技术。FCC选择LTE-V2X在美国进行了大规模部署。
中国正在广泛部署LTE-V2X,根据政府发布的战略要求,专门为LTE-V2X分配了频谱,中国部分汽车制造商承诺在2022/2023年开始部署并准备大规模推出C-V2X,预计到2025年将实现大规模V2X覆盖。
另据新消息,2024年6月4日,工信部、公安部、住房城乡建设部、交通运输部等四部门联合发布公告称,将有序开展智能网联汽车准入和上路通行试点,由长安汽车、比亚迪、广汽等汽车生产企业和使用主体组成的9家企业此次进入试点的联合体,工作目标是:
- 一方面引导智能网联汽车企业加强能力建设,在保障安全的前提下,促进产品的功能、性能提升和产业生态的迭代优化;
另一方面,基于试点实证积累的管理经验,加快健全完善智能网联汽车生产准入和道路交通安全管理体系,推动智能网联新能源汽车产业高质量发展。
在产品方面,支持DSRC和C-V2X的解决方案均基本就绪。作为V2X早期的推动者之一,NXP V2X系统平台在5.9GHz和760MHz频段中运行,与所有优秀供应商的全球软件协议兼容,可在全球使用。
其中,RoadLINK SAF5400是通过汽车应用认证的、适用于V2X应用的单芯片DSRC调制解调器,能够在芯片上每秒中继多达2000条基本安全消息(BMS)验证,从而为发送和接收的消息提供更好的范围。同时还可以利用NXP的i.MX应用处理器得到进一步增强,该处理器现已包含在其V2X系统解决方案中。此外,SAF5400还集成了NXP的高性能安全元件技术,以便满足V2X无线安全要求。

图1:单芯片DSRC调制解调器RoadLINK SAF5400系统框图(图源:NXP)
DSRC和C-V2X源于不同的技术,导致了根本不同的操作方法。Autotalks是一家专门致力于为人工驾驶和自动驾驶车辆提供V2X通信的半导体公司,同时也是唯一一家提供可兼容两种V2X技术的V2X解决方案企业。 它的第三代设备TEKTON3和SECTON3还增加了5G-V2X功能,这些设备可同时操作5G-V2X信道和额外的LTE-V2X(或DSRC)信道。 其中,TEKTON3是一款完全集成的V2X SoC芯片,专门用于支持基于车联网的驾驶操作。在与TEKTON3芯片搭配组建的参考设计中,由英飞凌提供的车规级HYPERRAM 3.0存储芯片具有16位HYPERBUS接口,可实现800MBps的传输速率,满足外部存储器对成本、功率密度和数据处理性能等各项要求,从而帮助OEM厂商创建有针对性的新一代汽车V2X解决方案。
图2:英飞凌车规级HYPERRAM 3.0存储芯片与TEKTON3搭配可组建支持双标准的第三代V2X参考设计(图源:Infineon)
结语
目前,全球约有100万辆V2X联网汽车在路上行驶,大部分集中在欧洲和中国。其中约一半的市场使用了基于DSRC的技术,另一半市场使用C-V2X技术,这部分的大多数车辆在中国。 根据IDTechEx的报告《2024-2034年联网和软件定义汽车:市场、预测和技术》,全球的V2X市场将主要向C-V2X技术转变,预计90%以上的市场将使用基于5G的C-V2X,这一转变的主要贡献者将来自美国和中国。到2034年,中国每年将新增3,000万辆V2X汽车,V2X将成为大多数车辆的标配。欧盟是一个官方技术中立的地区,现在拥有强大的DSRC/ITS-G5基础,一些C-V2X模块提供商正在向该地区提供支持C-V2X和基于Wi-Fi的V2X技术的双系统。
V2X技术和产品碎片化问题是当前行业发展的重大挑战,除非使用同一型号的产品,路上配备V2X的车辆几乎没有相互发送和接收数据的能力。像LTE和5G这样的大规模网络,将有效地弥合车辆、基础设施和行人之间的数字鸿沟,使它们能够真正进行相互通信。不过,该技术尚未在汽车行业获得完全采用,市场推广力度亟需加强。
从长远来看,V2X技术是提高道路安全和实现全自动驾驶的一种颇有前途的解决方案。Zion market research的研究数据表明,2023年全球汽车V2X技术市场规模约为5.4亿美元,预计到2032年将达到约189亿美元,2024年至2032年的复合年增长率高达48.50%。归纳起来,V2X技术有望改变现有的交通格局和人们的出行方式,使我们的道路变得更安全、更高效、更互联。
要使这一愿景成为现实,需要包括汽车制造商、监管机构和消费者在内的所有利益相关者共同努力,克服未来的各种挑战,比如建立一个功能性和可互操作的V2X生态系统,让所有利益相关者站在同一立场,工作在同一平台。只有这样,V2X才能更快地从愿景走进现实。
文章来源:贸泽电子
来源:内容由半导体行业观察(ID:icbank) 编译自eetimes. jp,谢谢。
ADAS(高级驾驶辅助系统)/自动驾驶传感器的全球市场预计到 2030 年将达到约 3.7 万亿日元(约合235亿美元)。车载传感器(主要是雷达和摄像头)的需求将持续增长,预计2023年市场规模将扩大约2.4倍。
ADAS 摄像头,像素数从 1.7/5.4MP 增加到 8MP
2024年6月,矢野研究所对ADAS(高级驾驶辅助系统)/自动驾驶传感器的全球市场进行了调查,预测到2030年市场规模(制造商出货量)将达到约3.7万亿日元。以雷达和摄像头为中心的车载传感器需求将持续增长,预计2023年市场规模将扩大约2.4倍。
该调查针对安装在车辆前部、侧面和后部的传感器模块。具体产品包括77GHz毫米波/24GHz亚毫米波雷达、传感摄像头、后视/环视摄像头、超声波传感器、激光雷达、红外激光器等。它不包括用于 4 级或更高级别 MaaS 车辆或无法容纳乘客的 LSV(低速车辆)的传感器。调查期间为2023年4月至2024年2月。
预计2023年全球ADAS/自动驾驶传感器市场规模为15,485亿日元。AEB(自动紧急制动)的标准安装在日本、美国和欧洲已取得进展。在中国,配备该技术的车型数量也在增加。
因此,用于检测车辆前方物体和人员的 ADAS 雷达和摄像头的出货量有所增加。ADAS雷达(包括使用77GHz毫米波或24GHz亚毫米波的雷达)的市场规模预计到2023年将达到4562亿日元。汽车摄像头市场,包括传感摄像头和后/环视摄像头,也预计将达到9356亿日元。
ADAS 传感器(主要是雷达和摄像头)的需求预计在 2024 年后将继续增长。预计2024年全球ADAS/自动驾驶传感器市场规模将达到16051亿日元。
预计2030年全球ADAS/自动驾驶传感器市场规模将达到36,929亿日元。这背后的原因是 ADAS 的采用率。在日本、美国、欧洲几乎达到100%,在中国超过80%。预计从 2028 年起,东盟和印度的需求也将认真回升。
此外,为了符合 NCAP(新车评估计划),预计安装的雷达数量将会增加。反映这些趋势,预计 2030 年 ADAS 雷达的市场规模将达到 1.094 万亿日元。此外,预计到2030年,E/E(电气/电子)架构将应用于中档车型,每辆车安装的传感器数量将增加,支持市场规模的扩大。

ADAS/自动驾驶传感器全球市场规模预测
来源:矢野研究所
在同一份研究报告中,矢野研究所将“ADAS 摄像头和侧面/后部应用的更高像素分辨率”列为关注点。目前量产汽车中安装的ADAS摄像头的像素数为1.7MP(百万像素)或5.4MP。未来8MP相机将在日本、美国、欧洲广泛采用。选择高像素产品的主要原因之一是它具有120度的FOV(可视角度),可以进一步提高安全性。
此外,为了实现2级城市(L2一般道路)和高性能记忆停车辅助系统(L2代客泊车辅助),除了正面之外,在侧面和后部安装ADAS摄像头的运动也越来越多。预计长期来看,ADAS摄像头的出货量将会增加。
参考链接:https://eetimes.itmedia.co.jp/ee/articles/2406/12/news055.html
作者: Senya Pertsel ,来源:Ambarella安霸半导体
科技进步推动产品创新,给各行各业的设计师们带来了前所未有的挑战,这一点在汽车行业尤为明显。汽车厂商正努力将已实现 ADAS 功能的 L2 自动驾驶技术升级到 L3 和 L4,并最终能在自动驾驶领域,将基于 AI 的系统发展到 SAE 6 级水平。L3 级乘用车已在全球多个地区上路行驶,L4 级自动驾驶出租车目前也在旧金山等城市街道上进行广泛试验(在有些地区已投入商业使用)。但是,在这些车辆大规模投入市场之前,仍存在许多商业、物流和监管方面的挑战。
汽车厂商面临的挑战之一是要弥合两种情况之间的差距:一边是于少数技术实例的概念验证,另一边是将概念转化成为稳健、可重复和实用的大规模制造和部署。后者要求设计稳定、安全、可靠,并且定价合理。
在进行概念验证时,可以通过不同的途径实现目标。“自上而下”的方法是在车辆中集成尽可能多的硬件、传感器和软件,然后通过实现融合、降低复杂性,达到性能、成本和重量目标。相反,“自下而上”的方法则更有条理,汽车厂商先完成一个级别的自动驾驶设计,然后再收集数据并克服必要的挑战,达到下一个级别。后一种方法越来越受到大型主机厂的青睐。
设计过渡从L2到L3到L4逐步提升
汽车要提供先进的 ADAS 系统,并最终实现自动驾驶,必须感知周围环境,然后根据 “看到的内容”采取行动。车辆对环境的认知越准确,就能做出越好的决策,行车也越安全。因此,设计自动驾驶汽车时,首先要确定部署在车辆周围的传感器数量和类型。在环境传感方面,有三种常用技术:图像传感器即摄像头、毫米波雷达和激光雷达,三者各有利弊。
在上述的三种传感器中,很明显,摄像头和激光雷达的算法处理已经普遍在中央域控了,而目前市场上的各类毫米波雷达,通常还是前端处理,生成目标以后,再送到中央域控,而并非中央集中处理。我们将在本文中着重介绍对于 4D 成像毫米波雷达进行中央集中处理的必要性和安霸 CV3 在这方面的技术优势。
一旦确定了车辆对传感器的需求,就要做出一系列关键决定,包括设计系统架构和选择配备合适的处理器。这就需要从根本上考虑是集中处理传感器数据,还是在前端处理传感器数据。

图1 确定传感器架构是自动驾驶汽车取得成功的前提
传统 3D 雷达技术虽然成本较低,但在感知能力存在着一些不足。通常毫米波雷达做前端计算,生成目标以后,在域控里和来自摄像头的感知结果做后融合。这种方式因为在前端的信息损失,不仅使得 3D 雷达的作用被大大削弱,并且在视觉感知高度发展的今天,传统 3D 雷达有靠边站的趋势。
随着毫米波雷达技术的演进,我们看到 4D 成像毫米波雷达的技术指标比起传统 3D 毫米波雷达有了大幅的改进,包括多了一个高度维度,看得更远,点云更密集,有更好的角分辨率,对静止目标检测更可靠,更低的误检和漏检等。4D 成像毫米波雷达之所以有这些技术优势,往往来自于更复杂的调制技术,和更复杂的点云算法,跟踪算法等。因而 4D 成像毫米波雷达往往需要专门的雷达处理芯片才能达到所需的高性能。目前市场上已经存在一些在前端雷达模块中添加雷达 DSP 或 FPGA 来进行前端计算的设计。虽然这些前端计算的 4D 成像毫米波雷达有些展现出比传统 3D 雷达更好的性能,成本较高,不利于广泛应用。
而在集中式处理方法下,由于所有传感器的原始数据都在一个中心点进行合并,数据进行融合时不会丢失关键信息。由于不在前端进行处理,毫米波雷达传感器模块大大简化,从而缩小了尺寸,降低了功耗和成本。此外,大多数毫米波雷达都位于车辆保险杠后侧,最大限度地降低事故后的维修费用。
集中式处理方法还能让研发人员灵活地实时调整毫米波雷达数据和摄像头数据的相对重要性,在各种环境天气和驾驶条件下提供最佳的环境感知能力。举例来说,在恶劣天气条件下,沿高速公路行驶时,毫米波雷达数据将发挥更大优势;而在拥挤的城市中缓慢行驶时,摄像头在识别车道线,读取道路标志和场景感知,识别危险方面将发挥更重要的作用;而激光雷达对于一般障碍物检测和夜晚 AEB 方面更有特色,动态配置传感器套件可以节省处理器资源,降低能耗,同时提高环境感知能力和安全性。
前端处理与中央域控处理4D成像毫米波雷达的比较
前端处理成像雷达
1. 算力受限,更大的算力带来更大的功耗,影响雷达数据密度和灵敏度
2. 固定的计算模式,必须为最恶劣的场景考虑,虽然在常见场景用可能用不到
3. 更高的雷达前端成本, 因为雷达的数据处理放在前端节点,增加成本
4. 传感器融合过于简单,只能用目标级融合
中央处理的域控雷达
1. 为更强大更高效的集中处理,雷达可以得到更好的角分辨率,数据密度和灵敏度
2. 算力可以根据场景,在几个雷达之间动态调整,以达到更好的算力利用率,提升感知结果
3. 更低的雷达前端成本,因为雷达的前端只有传感器,没有计算单元
4. 可以做4D雷达数据和摄像头数据深度的深度融合
SoC 选择
随着电动汽车的普及,如何节约电能并最大限度地提高“每次充电的续航里程 ”成为每个车辆零部件的关键考虑因素。节能是集中式 AI 域控芯片的优势。有些多芯片中央域控消耗大量电能,因而缩短了车辆的续航里程。如果 SoC 产生的热量过大,需要设计主动冷却方案,甚至某些架构需要液体冷却,这就大大增加了汽车的尺寸、成本和重量,从而降低了电池续航能力。
AI 智驾软件正迅速成为系统的关键要素,AI 的实现方式对 SoC 的选择,以及开发系统所花费的时间和资金投入都有重大影响。关键是如何以最小的工作量和能源,运行最新的神经网络算法,但又不牺牲精度。这不仅需要仔细考虑硬件该如何实现神经网络,还要考虑为中间件、设备驱动程序和 AI 工具提供支持,缩短开发时间并降低风险。
车辆出厂后,无论是解决某个问题,还是新增功能,软件都需要持续更新。基于单个域控制器的集中式架构简化了这一过程,OTA 升级的实现,解决了目前需要单独更新每个前端模块软件的难题(更加昂贵和复杂)。这种 OTA 方法也意味着系统网络安全是设计过程中需要解决的另一个重要领域。
SoC 的选择影响着设计过程的各个方面,包括整辆自动驾驶汽车的效能。为了赋能大型主机厂更快落地极具性价比的智驾产品,综合性地考虑到客户需求,为客户带来主攻 L3/L4 旗舰智驾系统的大算力中央域控 AI 芯片 CV3-AD685,该芯片可实现 4D 成像毫米波雷达原始数据的集中式处理和深度融合。
为什么安霸傲酷雷达可以做到成本更低呢?
这是因为,传统 4D 成像毫米波雷达使用固定的调制技术,需要根据调制方案对性能进行折中。不过,采用基于 AI 的实时动态波形的新兴 4D 成像毫米波雷达设计正在帮助解决这一难题。将 “稀疏化阵列天线”与可动态学习并适应环境的 AI 算法(即虚拟孔径成像(VAI)技术)相结合,从根本上打破了调制带来的性能折中,可将 4D 成像毫米波雷达的分辨率提高至 100 倍。这大幅度提高了角度分辨率,以及系统性能和精确度,而天线数量也减少了一个档次,外形尺寸、功率预算、数据传输要求和成本也相应降低。
如何在 CV3 上做中央域控雷达设计呢?
CV3 支持雷达前端传感器直接传输 RAW 数据到域控,而在 CV3 上完成必要的雷达计算包括高质量点云生成,处理,跟踪等算法。CV3-AD685 上带有专用 4D 成像毫米波雷达处理硬件单元,简洁而高效地完成多个雷达同时工作时的数据处理。
图 3 显示了一个功能强大的 SoC 框图,它是安霸的 CV3-AD685。该 SoC 专为汽车中央域控制器而设计,可高性能运行各种神经网络算法,实现完整的自动驾驶解决方案。CV3-AD685 带有专业图像信号处理单元、可使用各种传感器感知(如来自摄像头、毫米波雷达、超声波雷达和激光雷达)、执行多种传感器的深度融合,运行车辆路径预测规划控制等算法。CV3-AD 系列专为汽车智驾设计的架构与 GPU 等竞品芯片架构截然不同,GPU 一般采用更为通用的并行计算设计,以运行各种不同的应用。因而在运行智驾应用的时候,CV3 比竞品的效率更高,功耗更低。

图3 安霸 CV3-AD685 SoC 框图,该芯片专为汽车应用中的集中式AI域控而设计。
如图 3 所示,该 SoC 集成了神经网络处理器(NVP),通用矢量处理器 (GVP)(用于加速通用机器视觉算法和毫米波雷达处理)、高性能图像信号处理器(ISP) 、12 个 Arm® Cortex®-A78AE 和多个 R52 CPU,双目立体视觉和密集光流引擎、以及 GPU(用于 3D 渲染如 AVM )。CV3-AD系列的整体架构和 CV3-AD685 相同,适用于从 L2+ 到 L4 级汽车智驾系统,拥有充沛算力和安全冗余,可运行完整的自动驾驶解决方案。其 AI 性能则在高性能 GPU 的 3 倍左右,尽管性能出众,这款 SoC 的工作功耗却大幅低于竞品。因此,使用 CV3-AD685,与竞品芯片相比,在电池容量相同的情况下,电动汽车的续航里程至少可增加 30 公里。另外,在保持相同续航里程的情况下,电池成本可以大幅降低,电池重量也可以减少几公斤。
总结
近年来,智驾技术取得了质的飞跃。不同的智驾高级功能成为主流已有一段时间,随着汽车厂商不断创新突破,其他新功能也不断涌现。汽车行业现在面临的挑战是如何将目前的 L3 和 L4 级智能驾驶试验车全面投入生产。
这一进步的关键在于传感器的选择,包括车辆的结构和域控芯片的选择。使用专为集中式传感器融合设计的处理器,以及基于 AI 的创新技术(如稀疏化毫米波雷达阵列),自动驾驶汽车可以集中处理毫米波雷达数据,并将其与摄像头数据进行融合,对车辆周围动态环境做出及时反应。这种性能和灵敏度的提高可以减少对激光雷达的依赖性,进一步降低成本,并且达到更好的环境感知性能。
近日,以“越尽千峰,生生不息”为主题的亿咖通科技生态日(ECARX Tech Day 2024)成功举办。来自国内外众多整车品牌、生态企业和行业伙伴等齐聚杭州,一同奉献了一场科技盛宴。芯擎科技创始人、董事兼CEO汪凯博士率团队出席大会,并重磅揭晓芯擎科技的全场景高阶智驾新品 - 龍鹰智驾系列AD1000。


文章来源:芯擎科技SiEngine
要点
Omdia对近年来自动驾驶感知系统的新技术、新趋势作了深入的研究,相关的数据和洞察发布在最新的英文报告《Automotive CMOS Image Sensor & Camera Module Report - 2023》中。如需了解更多内容,请向Omdia进行咨询。
汽车工业发展到今天,智能驾驶能力已成为各家车企比拼技术实力的核心赛道。随着智能汽车价格的不断下探,高阶智驾有望进入普及时代。目前,高速NOA功能已进入快速渗透阶段,城市NOA功能也相继落地。高阶智驾系统对传感器的依赖将极大地推升智能传感器的市场需求。
得益于AI算法的升级,越来越多的车企采用以视觉为主的感知方案。这类方案减少了对激光雷达的配置,大幅降低了系统硬件成本。然而,纯视觉方案对算法的要求较高,需要海量数据做训练,其探测精度也易受到天气和环境的影响。对于自动驾驶来说,器件冗余是安全的必要保障。因此,多传感器融合的感知方案仍是现阶段多数车企的选择。
作为自动驾驶最重要的传感器,摄像头的像素持续升级,800万像素摄像头的搭载量迅速提高。相比100万~200万像素,800万像素车载摄像头意味着更远的探测距离、更宽的视角,以及更高质量的图像信息。目前的高速NOA以800万像素摄像头为主。随着360°全景式影像监控系统越来越受到关注,环视摄像头用量的大幅增加。高阶智驾更多采用11V或12V的配置(2~3个前视摄像头,4个环视摄像头,4个侧视摄像头,1个后视摄像头),有助于带动前视和侧视摄像头的装车量的提升。

来源:Omdia
激光雷达不论在测距能力、测量精度及抗干扰等方面都比其他传感器表现优越,是高阶自动驾驶系统的核心传感器。目前阻碍激光雷达大规模应用的主要障碍来自于其高额的成本,尤其在去年全行业降本增效的压力下,汽车终端市场的价格战进一步阻碍了车载激光雷达的普及。激光雷达降低成本的关键途径在于产品的革新。从机械式演变为纯固态,以及采用半导体工艺的芯片代替传统的分立式架构,都是目前激光雷达厂商努力研发的方向。
4D毫米波雷达是近年来自动驾驶领域的热门话题。传统的3D毫米波探测距离近,精度不足,无法对物体的高度信息做出检测。4D毫米波雷达成功地解决了这些痛点,并可以结合算法识别物体,能够适应更加复杂的路况。但就分辨率来讲,4D毫米波雷达仍无法与激光雷达匹敌,未来可能会在一些中高级自动驾驶系统中取代低线激光雷达。盲点检测将是4D毫米波雷达的一个重要应用。
本文作者:儒卓力汽车业务部门(ABU)产品销售经理Ralf Hickl
未来越来越重要的是:汽车电气系统中的智能配电。通过使用英飞凌的全新元件,智能配电设计变得轻而易举。PROFET Load Guard是受保护高压侧开关系列的最新成员,其功能专为保护电子负载和配电架构而设计。
随着先进驾驶辅助系统(ADAS)和自动驾驶不断发展,要求为不断增多的控制单元提供智能化的安全供电。这就要求对电气系统进行保护,防止有缺陷的用电设备造成过流甚至短路。
可通过多种方式提供保护功能:一方面,采取措施限制单个用电设备的电流;另一方面,在电气系统出现长时间电压下降之前,迅速断开有故障的用电设备或有故障的电气系统部分与系统其他部分的连接。否则,长时间的电压下降会迫使ADAS 重要功能的 ECU 进入欠压复位,从而短暂禁用与安全相关的功能。
传统的保险丝和继电器无法胜任这一任务,因为它们的开关速度比智能半导体模块低 100 倍。这会使敏感负载和电源面临过载风险。此外,熔化的保险丝必须更换,而且不能像半导体模块那样复位。这不是选择方案,尤其不适合未来的区域架构。
新功能
英飞凌新型PROFET Load Guard系列产品完美结合了保护和诊断功能,适用于设计未来的 ADAS 系统。这款灵活的高压侧电源开关具有多种功能,如电源保护、负载控制和保护、自我保护和电线保护。由于PROFET Load Guard可限制浪涌,因此也适用于切换电容性负载。电容性负载开关模式(CLS 模式)还可快速接通大型电容器,而不会发生模块热过载。由于可调节电流限制,该元件还能保护传感器供电线路中的敏感滤波元件(关键词:同轴电缆供电)。实际电流值的公差比(kILIS)非常精确,因此还能对负载状况进行精确诊断。
图1显示应用实例:通过同轴电缆为两个 ADAS ECU(本例中用于摄像头)供电,由滤波器隔离信号(图中为数据)和电源电压。如果摄像头造成短路,PROFET Load Guard(图中蓝色部分)会将负载电流限制在预设值内。一方面,电流限制可保护滤波器线圈(PoC),防止负载端过热。另一方面,DC/DC电源也能保持在规定的负载范围内,并能够继续为另一个摄像头供电,而不会出现任何问题。因此,电流限制可确保负载电路之间不受干扰。
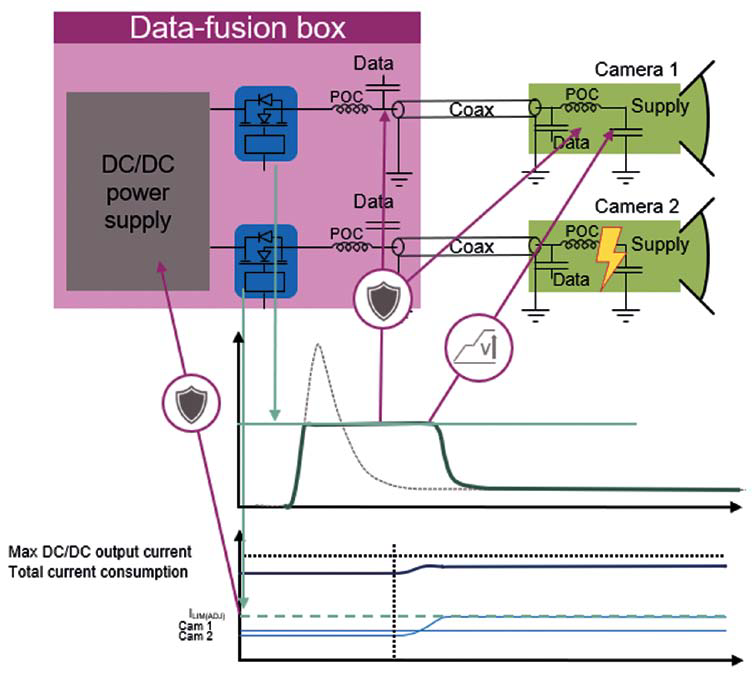
图 1:PROFET Load Guard 12V使用案例:通过同轴电缆为 ADAS摄像头供电。(图片来源:英飞凌)
可调节电流限制技术的最新发展
图2显示PROFET Load Guard系列产品 BTG7090-2EPL 及其内部功能块框图。这款过流限制模块是全新的功能模块。与前代产品相比,PROFET Load Guard在发生过流时不会简单地关闭,而是继续运行,并且将输出电流限制在预设限值内。
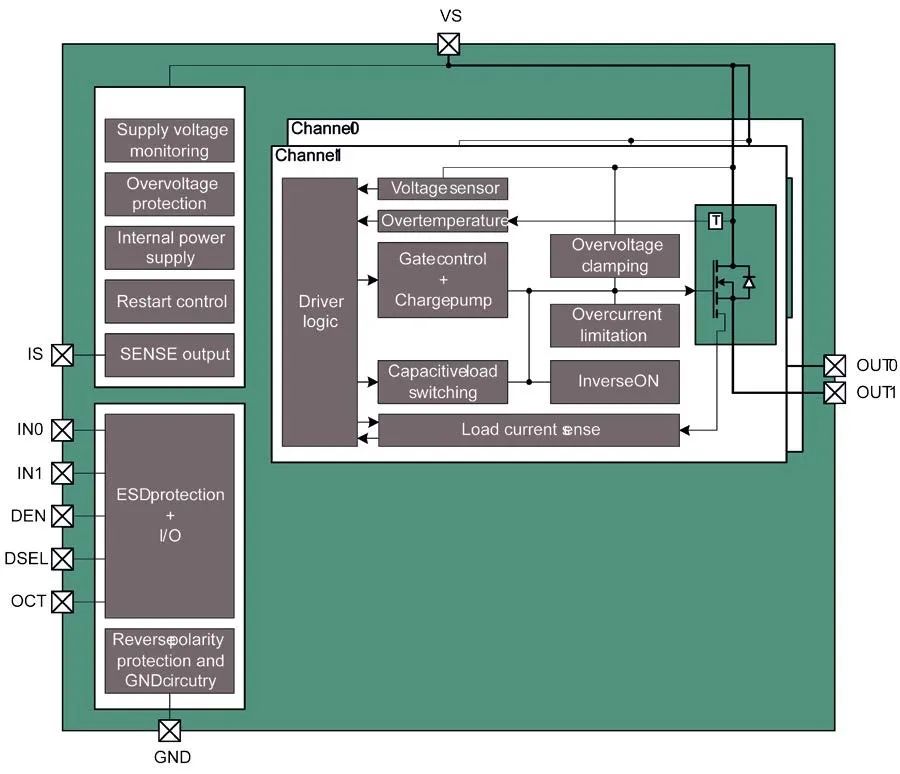
图2:PROFET Load Guard BTG7090-2EPL框图。(图片来源:英飞凌)
为此,BTG7090-2EPL配备了可调节电流限制功能,外部电阻用于配置最大电流。在过载情况下,输出电流被限制在电阻器设定的极限电流范围内,PROFET Load Guard的输出晶体管进入线性工作状态。晶体管中产生的功率损耗会加热元件。只有当芯片温度或温度梯度达到一定的最大值时,元件才会关闭受影响的通道以保护自身。然后,重试策略开始发挥作用,这是自动重启和锁定功能的结合:在关闭后,芯片温度再次下降,PROFET Load Guard会自动重新开启(假设控制输入端有持续的高压信号)。如果六次重启尝试失败,输出级将永久关闭(锁定)。控制输入端的低-高序列将重置内部重试计数器,并重新开启输出。
由于电流限制可调节,该模块在应用中具有很高的灵活性。通过选择电阻器,其功能可适应不断变化的要求。
在自我保护方面,依靠温度监控器在温度过高时关闭开关。当然,控制微控制器也可以关闭 PROFET Load Guard。感应引脚上的诊断反馈信号可作为决策依据。因此,该模块还能提供负载当前功耗的精确反馈(±5%)。
处理回流电流减少功率损耗
PROFETLoad Guard只能关闭一个方向的电流。在另一个方向上,即使通道本身不导通,MOSFET 的本体二极管也会导通。例如,在作为负载的再生电机中就存在作为负载的再生电机中就存在电流回流。体二极管中可能会产生高功率损耗,使得芯片发热,也可能使相邻通道发热,从而导致它们关断。
反向开启(InverseOn)产品功能允许内部 MOSFET 在回流电流处于一定限制范围内时开启。其优势在于:发生在 MOSFET通道中的功率损耗小于发生在体二极管中的功率损耗。
借助电容性负载开关 (CLS) 功能块,PROFET Load Guard还适用于大型电容性负载的快速充电和开关。为此,输入由特定的 PWM 控制,该PWM信号使模块进入具有连续自动重启关闭策略的 CLS 模式。开关周期不断重复 “导通并提供限流” 和 “由于温度陡升保护而关断”,直到输出晶体管在导通状态下的压降低于某一特定值。在这种情况下,认为电容性负载已充分充电。之后,PWM 将被永久切换,并由控制输入端的高电平所取代。优点是在此期间,模块仍处于规定的安全工作区 (SOA)。

图 3:带有两个通道并采用14引脚TSDSO封装的PROFET Load Guard。(图片来源:英飞凌)
可用性、模拟性能和评测板
PROFET Load Guard已通过ISO-26262。因此,英飞凌在安全应用说明 (SAN)中提供了相关信息,有助于将该组件集成到功能安全系统中。首款衍生产品是双通道 BTG7090-2EPL,儒卓力可应要求提供样品。量产已于 2022 年底开始。感兴趣的用户可在网页www.infineon.com/profetloadguard上找到数据表、仿真模型和其他工具。
为了便于评测,英飞凌提供两块用于组装套件的电路板:主板 PROFET ONE4ALL MB V1 和子板 BTG7090-2EPL DAUGH BRD(图4)。
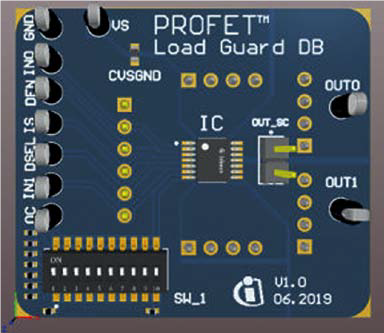
图4:带有PROFET Load Guard的子板。(图片来源:英飞凌)
结合使用英飞凌的μIO-Stick和Config Wizard GUI,可以对模块进行配置、控制和测试。
总结
ADAS需要在车辆电气系统中提供可靠的电源。为此,必须保护电气系统不受其他有缺陷且有过大电流需求的用电设备的影响。PROFET Load Guard的限流功能可根据系统要求进行调整,首先不允许输出端出现危险的短路电流和峰值电流,从而保护负载和12V电源免受过载影响。
本文转载自:儒卓力微信公众号
2018 年,汽车行业“缺芯”潮来得猝不及防,而后波及所有电子元器件品类,自此vwin网站 “一芯难求”成为街头巷尾热议的话题。今天,我们看到经过几年的上游扩产,叠加近期汽车终端市场的不景气因素,缺芯现象得到明显缓解,仅剩下少部分主控芯片依旧维持长交付周期的状态。
汽车电动化、智能化下的增量市场相当可观
回顾过去,真的只是电子供应链市场周期性波动带来的“缺芯”问题吗?回答是否定的,究其最深层的原因,还是汽车电动化、智能化趋势下电子电气架构变革带来的增量市场上升速度太快,导致车规级芯片市场供不应求,从而产生“缺芯+涨价”的应激反应。
汽车芯片主要分为功能芯片、功率器件和传感器三大类。在传统燃油车中,平均芯片搭载量约为 500-600 颗/辆,而随着前面提到的汽车电动化、智能化的演进,平均芯片搭载量已提升至 1000 颗/辆,在新能源车中更是超过了 2000 颗/辆,未来随着电车智能化的升级,还有望提升至 3000 颗/辆,甚至更多。
商业价值最大化,L2/L2+是短期内的行业共识
作为汽车智能化的核心,近年来自动驾驶技术的发展非常迅速。当前,部分汽车厂商已经推出了具备 L2 级别自动驾驶功能的车型,比如特斯拉 ModelS、广汽新能源 AionS、小鹏 G3、蔚来 ES8、一汽大众探岳、长安 CS75、WEYVV6、吉利缤瑞等。
那么,到底什么是 L2 级别自动驾驶呢?事实上,市面上有两套自动驾驶分级标准,分别是 2014 年国际汽车工程师学会(SAE)首发的《SAE J3016 推荐实践:道路机动车辆驾驶自动化系统相关术语的分类和定义》,简称《SAE 驾驶自动化分级》;以及 2021 年我国国家市场监督管理总局出台的《汽车驾驶自动化分级》国家标准(标准号:GB/T 40429-2021)。两者的区别在于国家市场监督管理总局、国家标准化管理委员会将 L1 至 L2 级别统称为辅助驾驶,L3 至 L5 级别统则称为自动驾驶。下面,我们以国际标准为例来具体介绍一下。
在《SAE 驾驶自动化分级》标准中,自动驾驶被分为 L0 级~L5 级:
L0 级:无自动化,纯人工驾驶;
L1 级:驾驶支持,以人工操控为主,系统提供适时辅助,常配有制动防抱死系统、车身电子稳定系统等;
L2 级:部分自动化,虽然自动驾驶系统能够完成某些驾驶任务,但驾驶者仍需专心于路况,当系统出现差错时需要人为进行纠正,常配有自适应巡航系统、主动车道保持系统、自动刹车辅助系统和自动泊车系统等;
L3 级:有条件自动化,某些特定场景下的自动驾驶,车辆自动驾驶系统的优先级高于驾驶员,但是驾驶员可以通过紧急按钮随时取得车辆的控制权,如交通拥堵路段的自动跟车行驶、远程倒车入库等,以在公用路面上完成 L3 级别的自动驾驶车辆奥迪 A8 为例,其搭载了 24 个感应器和 41 种驾驶輔助系统软件;
L4 级:高度自动化,在规定的道路和环境中,车辆自动驾驶系统能够自主完成所有的驾驶操作,具备完全处理紧急情况的能力,驾驶员可以做自己想做的事情,如果出了事,责任将全部归属厂商,方向盘、油门、刹车等装置也或被取消;
L5 级:完全自动化,在所有道路和条件下,自动驾驶系统都能够完成驾驶任务,应对任何工况,驾驶员全程无需干预,此时也不再有驾驶舱的概念,汽车更像是一个智能机器人。
事实上,在 2022 年之前,全球汽车产业链上的企业对目标场景并没有那么清晰,所以总希望通过算力抬升来实现硬件冗余,而今天当自动驾驶往高阶发展,从 L2 开始逼近 L3,甚至再往上走,技术和产品批量落地面临的最大挑战是需求侧的承受能力,这正在倒逼车厂进行新一轮的成本管控下的系统优化。通过实践证明,这两年 L2、L2+级别的自动驾驶将成为车厂标配,这一趋势已形成行业共识。
自动驾驶技术演进下,“大芯片”成为标配
随着自动驾驶技术的不断演进,不仅车载芯片的数量在逐步增加,在跨域集中式和中央计算式架构中,大芯片正在成为标配,芯片设计的复杂性急剧升高。
2014 年~2018 年间仍以分布式 E/E 架构为主,跨域集中式架构刚起步,主流玩家 Mobileye、英伟达和瑞萨、TI 等传统 MCU 厂商的上车智驾芯片算力大都在 10TOPS 以下,如牢牢占据 L1~L2 级别视觉 ADAS 芯片市场的 Mobileye EyeQ3/Q4 的算力仅为 0.256TOPS 和 2.5TOPS。
不过也有特殊的,比如 2016 年搭载于特斯拉 HW2.0 平台的英伟达 Tegra Parker SoC 算力就提高到了 24TOPS,同时把 GPU 路线的自动驾驶 SoC 正式推向市场。
2019 年~2023 年间跨域集中式架构发展提速,英伟达开始引领高算力市场,相关电子供应链结构同步发生转变,除了英伟达外,特斯拉自研 FSD 芯片崛起,国产品牌地平线、黑芝麻、芯驰等抓住国产替代窗口开始发力。此时,智驾芯片面向应用场景和汽车终端产品定位出现算力需求分化,行业形成共识,L2/L2+级别自动驾驶在短期内更具商业落地价值,纷纷发力抢占市场。
值得一提的是,在 L2/L2+级别的中高算力自动驾驶市场中,算力需求已经达到了 30 TOPS~1000 TOPS 这个范围,比如 2020 年英伟达发布的针对 L2 级别市场的 Xavier 芯片,已上车小鹏 P7/P5 等车型,算力为 30TOPS;2022 年地平线发布的 J5 芯片,已上车理想、比亚迪、蔚来旗下阿尔卑斯、哪吒等车型,算力为 128TOPS;同年英伟达又针对 L2+级别高阶辅助驾驶车型推出 Orin 芯片,成为主机厂合作的王者,算力为 256TOPS。根据业内人士反馈,Orin 芯片的出现给 Mobileye、地平线、高通、黑芝麻智能、寒武纪等自动驾驶芯片企业带来了空前压力。
EDA 正在助力汽车芯片厂商实现性能和先发优势
对于这些大芯片设计厂商而言,如何缩减上市时间取得先发优势,在提高算力、安全等级的同时,改善芯片的 PPA(功耗、性能和面积),成为共同的追求目标。
传统的 EDA 工具常使用“经验法则”,需要设计人员根据直觉和经验进行优化,这种建模和仿真技术存在很多局限性,包括:无法从以前的设计中汲取经验,导致生产力受限且设计不够准确;多次迭代导致设计时间增加;HLS 通常需要更多的时间来完成综合;布局和布线取决于设计师的预测/经验,会增加运行时间;就时间和资源而言,制造成本高昂等。与此同时,车规级芯片的质量在很大程度上取决于底层半导体技术和设计规则,因此对 EDA 又提出了更高的要求。
所以对于一颗车规级大芯片而言,为了确保设计的正确性,必须在生产制造前进行大规模的仿真和验证,而芯片的算力规模越大、集成度越高,仿真验证的过程就会越复杂,设计人员需要更快地实现收敛和验证,来降低成本并提高结果质量。同时,传统的随机/自动测试模式生成(ATPG)方案在故障覆盖率方面已经不能满足实际需求。因此,将 AI 和 EDA 融合是大势所趋。
Cadence 作为 EDA 领域的深耕者和领导者,可以提供汽车智能设计所需的全部 EDA 工具、设计流程等,帮助工程师加速自动驾驶设计。同时,通过将 AI/ML 功能融入现有的 EDA 工具中,能够从手动到完全自动化不同等级产生更好、更可预测的结果,助力汽车厂商利用多学科分析和优化(MDAO)技术提高整体设计,从而实现更快速、更优质的结果,系统的精确行为建模也提高了产品保真度和安全性。
下面介绍两个 Cadence 在自动驾驶中所提供的典型解决方案——Cadence Tensilica 处理器 IP、Xcelium ML。
Cadence Tensilica 处理器 IP
Tensilica 处理器 IP 是 Cadence 根据应用需求量身定制的差异化处理器系列 IP,可满足各类 ADAS 硬件加速平台需求,其 DSP 内核 Tensilica ConnX 支持用于 L2 级别自动驾驶下 ADAS 的激光雷达、毫米波雷达中的高性能数据处理,提供性能、功耗和面积的理想组合,同时其 DSP 处理器 Tensilica Vision 与 Tensilica Al 处理器的集成可轻松实现视觉传感器数据处理。
对于汽车芯片厂商来说,在将 Tensilica DSP 产品集成到系统级芯片的同时,可以快速、轻松地进行软硬件划分的探索分析,满足将来算法的演进同时大大降低 CPU,GPU 和 AI 处理器的负载。同时使用 Tensilica Instruction Extension(TIE)语言自动生成处理器扩展和与之匹配的软件工具,并创建特定领域的差异化解决方案。
值得一提的是,搭载 FlexLock 的 Tensilica Xtensa 处理器现已通过车规级安全认证,完全符合汽车安全完整性等级 D 标准,提供 ASIL D 系统级和 ASIL D 随机故障防护,适用于功能安全(FuSa)应用,可以帮助更多大芯片设计厂商将安全模块集成到 SoC 中,减少模块设计和验证时间,增加产品先发优势。
以汽车雷达模块中的 SoC 为例,其通常由多个处理元件组成,包括控制器 CPU 和一个或多个 DSP 等。当 SoC 中的晶体管出现随机故障时,包括晶体管或其他物理元件磨损并卡在逻辑“0”或“1”处,由于 α 粒子引起的静态故障导致内存位从“0”翻转为“1”等永久性故障,或是由 SoC 中的信号串扰等噪声引起的瞬态故障等,这些故障都可能发生在与处理器紧密耦合的逻辑门或存储器中的处理元件中,最终造成安全问题。
因此,系统设计人员必须设定一个安全目标,即 DSP 中的随机故障不得导致车道标记等物体检测失败。该安全目标将指导设计人员采取适当的安全机制,以便在检测到随机故障时,安全控制器会收到通知并可以采取措施,例如重新初始化 DSP 等。如果 DSP 已经进行处理,则安全控制器负责采取措施确保在 DSP 重新初始化之前/期间达到安全状态。
在这种设计中,位于“安全岛”中的安全控制器可以起到安全关键决策的作用。当然,控制器也可能会出现随机故障,如果控制器检测到 DSP 故障,但控制器采取了错误的操作来响应该故障,从而使系统处于不安全状态,这类故障可能会产生严重后果,这种情况下设计人员就需要采用冗余的设计方法,让两个控制器同步运行,来大大降低此类事件发生的可能性。
综上,为了实现系统级别的安全目标,像雷达模块中的 SoC 这样的处理器设计是非常复杂的,所以芯片设计企业通常会向可靠的第三方购买 IP,来简化设计流程,提高流片的成功率,而 Tensilica 处理器 IP 是个不错的选择。
Xcelium ML
Xcelium Logic Simulation 是 Cadence 为 IP 和系统级芯片验证收敛提供的一款高速的仿真器,可为 SystemVerilog、VHDL、SystemC®、e、UVM、混合信号、低功耗和 X 态传播(X-propagation)提供业内优异的核心引擎性能,从而加快验证吞吐量。
其中,Xcelium Machine Learning(ML)App 利用专有的机器学习技术来缩短回归时间,可从以往的回归运行中学习并指导 Xcelium 随机引擎,在实现相同覆盖率的前提下大幅度减少仿真回归周期,或者产生特定覆盖点的激励触发更多的 bug来提高验证质量。
同时,Cadence 对特定领域还提供了相应的 App,包括混合信号、基于机器学习的测试压缩和功能安全,可以帮助汽车芯片设计团队尽早实现对 IP 和系统级芯片(SoC)设计的验证收敛,非常适合 Level 2+ 级以上 SoC 设计。
瑞萨电子汽车 SoC 业务部杰出工程师 Tatsuya Kamei 对此表示:“将 Xcelium Machine Learning(ML)App 纳入验证流程,有助于我们在紧迫的期限内,通过更少的回归测试来加速完成覆盖率的收敛任务,同时最大限度地提高验证性能和整体验证效率。”
而在这段表述的背后,是瑞萨电子借助 Verisium AI-Driven 验证平台,整体调试效率提高了 6 倍,整体随机验证回归缩短了 66%;以及依托 Xcelium ML App,实现了回归用例 2.2 倍压缩和 100% 覆盖率收敛的事实。
此外值得一提的是,瑞萨电子在不断使用机器学习进行回归迭代过程中,在实现 100% 覆盖率的前提下,将工作量减少了 3.6 倍。
瑞萨电子利用机器学习大大减少回归运行次数(从 3774 次减少到 1168 次),成功在规定时间内实现产品上市。除了节省资源、时间和加速覆盖率收敛外,Xcelium ML Apps 还为瑞萨电子节省了约 27 个工时。
写在最后
汽车产业的变革还在继续,芯片和电子系统的重要性只会越来越高。不可否认的是,在克服未知挑战的路上缺少不了整个产业链的通力合作,而 EDA 和 IP 将是贡献者链路上重要的一环。
在高级驾驶辅助系统(ADAS)和自动驾驶技术快速发展的推动下,现代汽车都配备了大量传感器,如摄像头、雷达、LiDAR等。车内数据通信车载网络正在向速度更快的汽车以太网标准转变。随着数据速度的增长,噪声抑制在这些网络中的重要性也提升了。
本期推文为大家介绍的是针对最新车载网络标准优化的噪声滤波器。
车载网络的发展
如今,汽车上都配有摄像头、传感器和雷达一系列等辅助驾驶电子设备。车载网络负责传输这些设备发出的数据,并集成各种ECU(电子控制单元)。由于车载网络的性能直接影响车辆安全,因此其是构成汽车基础结构的关键部分。目前,车载网络正在从当下常见的CAN -BUS(控制器局域网总线)*1标准向通信速度更快的汽车以太网过渡*2。汽车以太网不仅可以提高数据传输速率,还有助于提升实时性能和强化安全性。

汽车配有各种ECU,如与动力总成、信息娱乐系统和安全性相关的ECU,相互之间通过网络连接。
车载网络及噪声抑制的关键性
随着车载网络的数据传输不断向更高速和更大容量发展,噪声问题也逐渐变得不容忽视。噪声是一种干扰数据通信的无用信号,可能会破坏数据,导致传感器检测错误、传输延迟和各种电子设备故障。尤其是如今现代汽车充满了电子设备,而噪声引发的故障可能会严重影响汽车安全,因此噪声抑制比以往任何时候都更加重要。
众所周知,电子设备会产生电磁波。然而,如果某个电子设备在运行时既不干扰周围设备,其自身也不受外部干扰源的影响,则表明该电子设备具有电磁兼容性(EMC)*3。噪声滤波器就是实现电磁兼容性的典型元件。
顾名思义,噪声滤波器可以消除网络中不必要的信号(噪声),以保障数据通信的质量;另外还可以吸收或阻断噪声,从而确保数据通信准确无误。通过减少传输错误,噪声滤波器可以最大限度地提高具有先进功能的汽车的性能。
CAN总线和汽车以太网等网络标准采用差分信号传输法,该方法可以抵抗外部噪声,但来自内部电路的共模噪声同样会影响两个方向的传输。虽然不同类型的噪声都可能渗入通信线路,但共模滤波器专门用于有效消除共模噪声,保障通信质量。
为汽车网络选择合适的噪声滤波器十分关键
噪声滤波器必须适合相应通信标准、频率范围和数据速率。要对汽车以太网和CAN -BUS进行噪声抑制的话,就需要具有不同特性的滤波器。即使决定采用共模滤波器,也要根据共模噪声的消音频率要求缩小选择范围。由于噪声滤波器及其他电子元件出现故障会严重影响汽车安全,因此需要密切关注噪声滤波器的使用寿命、耐用性和可靠性。
TDK的共模滤波器采用专有设计和绕线技术,其高性能广受好评,在汽车应用的共模滤波器领域占有较大市场份额。此外,我们还成功开发了可兼容10BASE-T1S 标准的产品,领先于竞争对手。
近年来,随着自动驾驶技术的发展和电动汽车的普及,人们对汽车噪声控制的需求日益强烈,因此EMC技术在汽车设计中的重要性也日趋显著。在采用TDK的 ACT系列共模滤波器的车载网络中,除了传统CAN-BUS,汽车以太网等高速网络也得到快速应用,足以满足高速、大容量通信的需求。
除了具备强大的噪声抑制功能外,滤波器还要表现出良好的平衡特性,避免通信的信号受到不利影响。此外,汽车电气化与多功能化也扩大了共模滤波器在电源线中的应用,TDK将持续拓展其共模滤波器产品系列,以满足这一发展趋势。车载噪声抑制元件的市场预计还将继续扩大。TDK不仅将设计和开发元器件,还将提供全面的 EMC解决方案,包括提供评估服务和对策建议,从而为汽车行业的进步和发展贡献力量。
TDK 共模滤波器在汽车中的应用
随着车载网络变得速度更快、更复杂性,由噪声引发的挑战比以往任何时候都更加严峻。幸运的是,共模滤波器及其他噪声滤波器有助于克服这一挑战,并支持着车载网络的长足发展。为车载网络环境选择合适的噪声滤波器(多种标准可选)有助于进一步提升汽车的安全性和性能。一个小小噪声滤波器所蕴藏的技术有望为整个汽车行业的发展提供巨大支持。

TDK拥有丰富的噪声滤波器产品系列,包括可匹配CAN-FD和Flex-Ray等网络标准的产品。
术语解说
*1 - CAN-BUS(CAN总线协议):全称控制器局域网总线 (Controller Area Network Bus),是车载网络中应用最广泛的串口通信协议。
*2 - 以太网:个人电脑和电子设备最常用的有线网络标准。作为车载网络标准,也越来越受欢迎。
*3 - EMC:全称电磁兼容性 (Electromagnetic Compatibility),表示电子设备在噪声方面的性能,具体分为 EMI(电磁干扰)和 EMS(电磁感应强度),前者指设备本身发出的噪声,后者指设备对外部噪声的反应。
文章来源:TDK中国
近日,依维柯旗下欧胜车型将应用黑芝麻智能与中科慧眼联合打造的智能双目限高防撞预警系统,将进行小批量装车验证,预计于2023年第四季度量产。
黑芝麻智能针对依维柯汽车旗下欧胜房车的电子辅助功能配置,拓展开发限高防撞预警系统。搭载黑芝麻智能与中科慧眼联合打造的智能双目限高防撞预警系统的车型将于2023年第四季度实现量产。
此前,黑芝麻智能与中科慧眼联合研发了限高防撞预警系统,该系统应用了黑芝麻智能华山®二号A1000系列自动驾驶计算芯片,可对各类不规则的限高障碍物如桥洞、隧道、限高杆、路边指示牌、广告牌、树干等有潜在碰撞风险的物体进行实时和有效的检测。
依维柯汽车同样将在该智能双目限高防撞预警系统的基础上,针对欧胜车型展开进一步系统开发,即将进行小批量装车验证。

搭载基于黑芝麻智能A1000系列芯片研发的智能双目限高防撞预警系统的依维柯欧胜车型示意图
基于黑芝麻智能华山®二号A1000系列芯片平台开发的限高防撞预警系统,能够实时检测车辆前方、镜头视角范围内清晰可见的限高目标如限高杆、桥隧、路边指示牌、广告牌、树干等,当限高目标低于车顶高度、有碰撞危险时,系统通过自身和整车仪表进行声音和视觉的一二级预警。
华山二号A1000系列芯片内置车载专用高性能图像传感器、实时计算机视觉和神经网络处理器,搭载摄像头传感和技术框架,能够保障限高防撞预警系统卓越的计算性能和精准的感知能力。
南京依维柯是行业用车首选品牌,也是国内轻型客车的开创者。依维柯旗下的欧胜作为国内房车的经典车型,销量常年居于领先地位,拥有硬核产品力和坚实广泛的市场基础。与此同时,在当下旅游市场强劲复苏的背景下,自驾房车出行将成为越来越多消费者的选择,汽车市场也将迎来回暖与重塑的机遇。
黑芝麻智能深耕多元广泛的汽车智能化场景应用,为行车安全保驾护航的同时提供极致性价比智能化驾驶体验。目前,黑芝麻智能已开发涵盖乘用车及商用车,针对快速部署智能驾驶系统、安全系统和V2X等各种自动驾驶功能的完整解决方案。
未来,黑芝麻智能将以客户为中心,持续开发面向多元的汽车计算场景的智能汽车计算芯片,以强大的芯片平台赋能行业伙伴,拓展服务更多商用领域合作伙伴的体系能力,为客户提供覆盖各种自动驾驶功能的完整解决方案。本次基于黑芝麻智能芯片高级辅助驾驶系统的高质量合作,将推动中国商用车产业的智能化发展,助力中国专用车行业的高速发展趋势。
作者:儒卓力汽车事业部产品销售经理 Ralf Hickl
汽车正在学习倾听——不仅是倾听车内的乘客,也倾听外部环境。这是因为来自车辆环境的声音信号可以提供有关其他道路使用者的重要信息,从而提升不断增强的驾驶员辅助系统和自动驾驶功能。
麦克风已经成为车辆内部的普遍配置,所有较新的车辆至少都配备了强制性eCall系统,以便在发生紧急情况时通过声音进行沟通。新的应用接踵而来,例如:
- 通过生成反声波而发挥作用的主动降噪(ANC)
- 道路状况记录
- 发动机/驾驶噪声的频谱分析,用于预防性维护以及状态和故障检测
- 应急车辆的警报探测,包括识别其方向
通过AEC-Q103认证的英飞凌IM68A130A MEMS (微机电系统)麦克风提供聆听功能:它提供模拟输出信号并具有集成式低噪声前置放大器(图1),因而实现了只有–106 dBV(A)的低噪声本底和68 dB(A)的高信号/噪声比。同时,其声学过载点极限是130 dBSPL (声压级)。这些性能特点有助于扩大声学信号的动态范围,并且为非常柔和/遥远的声音以及非常响亮/接近的声音提供可理解性和信号保真度。

图1:TLGA封装IM68A130A MEMS麦克风 (图片来源:英飞凌)
IM68A130A具有出色的录音质量,外加介于10 Hz和16 kHz之间的直频响应特性。
对于语音识别算法来说,MEMS麦克风凭借高信噪比而提供可处理的数据。因此,即使以柔和的声调说出命令也能生成良好的信号。在车辆外面使用时,高信噪比有利于采集远处的声音,例如开启警报器的应急车辆正在靠近。
多个麦克风提供更多的选择
同时使用多个麦克风可提供更多的选择。因为在麦克风阵列中,来自一个声源的声音以不同的强度和时间偏移到达各个麦克风。用户可以从信号的差异中推断出声源的方向。可以采用数字信号处理从麦克风阵列信号来设置所需的方向特性(波束成形)。由于其灵敏度和相位响应的公差较小,IM68A130A也非常适合在阵列中使用。
使用A2B评测套件加快上市速度
当需要测试和优化带有多个符合汽车标准的MEMS麦克风的阵列时,英飞凌A2B评测套件是理想的选择,这款套件包含了通过A2B总线联网的多麦克风系统所需要的所有组件(图2)。每个从属模块可容纳四个麦克风。从属模块的封装是磁性的,可以附着在车体的金属板上(图3)。主单元中的32位Aurix系列微控制器负责数字信号处理。评测套件还带有用于各种配置(不同数量的从属单元或从属单元中的有源麦克风)的样本软件。

图2:英飞凌A2B评测套件及其组件:(1)带有Aurix系列微控制器的ECU主单元,(2)封装,(3)12 V插入式电源,(4)最多四个从属模块之一,(5)从属模块的磁性封装

图3:四个从属模块在车辆外部分布的实例
A2B评测套件的目标应用包括警报器检测、免提或语音控制,以及波束成形和主动噪声消除。
总结
随着车辆采用的感官感觉越来越人性化以及类别越来越多,自动化驾驶的进展就越大。英飞凌高性能模拟xenon MEMS麦克风,例如IM68A130A,能够确保实现声学环境的听觉感测。儒卓力产品组合还包括更多用于汽车的传感器产品,助力促进自动驾驶应用的发展。
问:车载激光雷达系统的设计思路
设计一个TOF车载激光雷达系统,首先要确定系统需要探测的最小目标、该目标的反射率,以及该目标的距离,视场角。上述这些因素会定义系统的角分辨率。并在该基础上计算最小信噪比(SNR),这也是后续软件判定检测对象真/假的重要检测标准。
检测距离
我们以自动驾驶汽车,防撞的应用来举例。最小目标:小轿车4.8m×1.8 m长。目标的反射率:取决于物体本身的性质(表面状况)。这里不详细讨论,假设目标可以很好的反射。
以汽车100公里/小时的速度来计算,不仅考虑以100 km/h速度行驶的车辆,还要考虑以相同速度反向行驶的另一辆车辆。因此,雷达系统需要能够检测到200公里/小时的物体,也就是每秒相对运动至少50m。
当然,还要考虑,如非线性速度、停车距离、规避动作等复杂情况。所以一般说来,高速应用需要激光雷达系统检测更远的距离。
视场角(FOV)
对于不同的应用,不同的环境,视场角的选择也不一样。

图 1. 自动驾驶车辆和自动地面车辆的对象检测和防撞等应用 (图片来源于ADI)
如上图:对于自动驾驶车辆和自动地面车辆的对象检测和防撞等应用,可以使用16像素FOV。在大客车应用中,可以用4× 4网格矩阵,以检测系统周围的物体,作为车辆的安全器件。
从FOV到角度分辨率
确定FOV之后, 我们可以计算相应的分辨率。
FOV可以分为垂直FOV(VFOV)和水平FOV(HFOV)
当激光二极管阵列选定之后,比如下图,一行16个激光二极管组成一个阵列,每个像素尺寸2mm×0.8mm, 20mm焦距的镜头。

图 2. 激光二极管阵列 (图片来源于ADI)
于是,可以利用三角函数可以计算每个像素对应的VFOV与HFOV

图 3. VFOV 与 HFOV 计算 (图片来源于ADI)
因此,根据三角函数我们可以得出每个像素,VFOV=5.7°,HFOV=2.292°
有了VFOV/HFOV, 我们就可以得知在某一特定距离,实物尺寸与相素的关系。
角度分辨率
换一个场景,假设FOV=1°,即1°角度分辨率,在200 m距离时,一个像素点,对应于2×Tan(0.5°)×200m=3.5m长的物体。
即1°角分辨率会转换成每侧3.5米像素。
对于4.8m×1.8 m小轿车来说,很难检测。
相比FOV=0.1°,即0.1°角度分辨率,在200 m距离时,一个像素点,对应于2×Tan(0.05°)×200m = 0.35m长的物体。
对于一个4.8m×1.8 m长的小轿车,在200 m距离时,至少可以有5个像素宽度的成像。
精细的角度分辨率使车载雷达系统能够从单一对象接收多个像素的返回信号。因此,在这个系统下,甚至有可能区分汽车和摩托车。
距离精度与最小信噪比(SNR)
距离(或深度)、精度都与ADC采样速率相关。距离精度允许系统准确地知道一个物体有多远。对于移动的应用来说,非常重要。
假设ADC采样周期Δt 为1 ns采样时段, 我们可以计算距离
d=(c×Δt)/2 = 15cm
c是光速
即使用1 GSPS ADC的距离精度可达到15 cm。
当然可以采用更复杂的技术(例如过采样插值)来改善范围测量精度。
据估计,大约可以将范围测量精度提升SNR的平方根。匹配滤波器是用于处理数据的性能最高的算法之一,它可以在插入之后最大化SNR,以得出最高的范围测量精度。
激光雷达系统拓扑结构
以ADI的方案为例:

图 4. ADI 激光雷达系统拓扑结构 (图片来源于ADI)
本文转载自: 得捷电子DigiKey微信公众号
作者:麦姆斯咨询王懿,来源:MEMS微信公众号
据麦姆斯咨询报道,近期,新纳传感(ACEINNA)宣布高性能惯性测量单元(IMU)IMU330RA全面上市。新纳传感的新款IMU330RA是一款易于集成的高性能6自由度惯性传感器,封装于IP69K级别的坚固密封模压成型塑料外壳。IMU330RA具有冗余的3轴加速度计和3轴陀螺仪,拥有出色的准确性和可靠性。

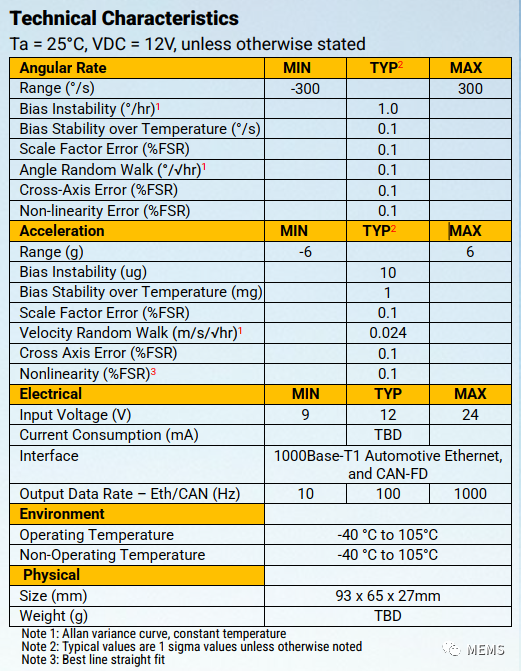
IMU330RA同时支持1000Base-T1汽车以太网和CAN-FD接口,并提供高达1000Hz的低延迟更新率。该IMU是一款经过ASIL B认证的车规级传感器,可为定位系统集成到ASIL D级别奠定基础。
新纳传感汽车业务部副总裁Teoman Ustun说:“我们的IMU传感器IMU330RA专为汽车L3级和更高级别的高级驾驶辅助系统(ADAS)而设计。这款新的传感器模块通过以太网和CAN-FD接口提供加密数据,输出速率高达1000Hz,并支持基于gPTP 802.1AS:2020和统一诊断服务的精确同步。”
IMU是自动驾驶汽车导航和安全系统的基本要素。IMU与各种感知传感器(激光雷达、摄像头、雷达、里程计等)协同工作,以确保车辆行驶在正确的路径上。但是,如果感知传感器由于隧道、地下等位置挑战或大雨、雪、烟雾等环境挑战而失灵,那么IMU的数据可以使车辆保持在其计划的路径上,直到来自感知传感器的数据恢复或车辆安全停止。

IMU330RA关键特性:
“世界上最遥远的距离,是同一个杆子上红绿灯和摄像头之间的距离。因为它们虽然挨的很近,但一点关系都没有。”来自中国工程院院士王坚的这段话,点出了智慧城市建设中存在的问题——汽车和路网、各种交通设备之间,都尚未完全实现互联互通。
当前许多智能汽车已经具备Level 2级辅助驾驶能力。但要继续向L3、L4级的自动驾驶迈进,仅仅靠单车智能是不够的,更需要的是车路协同技术发展和场景普及。车辆依靠自身的感测与计算能力,可以感知车辆周围数十米的环境;而透过车联网的协助,则可以将感知范围提高到数百米,从而给予车辆更多的反应时间。
C-V2X:车路协同的连接技术基础
车路协同,顾名思义就是车辆和整个道路系统要协同起来,构建一个车联网,实现各个节点之间的互联互通。车联网亦称V2X,可以按照连接场景划分为四个不同的部分。
1. 车辆之间的互联(V2V),可以减少车辆之间的相互碰撞事故;
2. 车与基础设施之间的互联(V2I),可以优化交通信号灯的定时和优先级;
3. 车与人之间的互联(V2P),可以给行人/骑行者提前发出安全警报;
4. 车与云端的互联(V2N)则可以让车辆实时获得交通、天气等即时信息,并为其提供定制导航和云服务。
而像车队管理和队列行进这些复杂场景,则需要V2V和V2N一起来实现。
在车联网硬件设备层面,车端需要有OBU(On Board Unit),而在路侧需要有RSU(Road Side Unit),此外还需要通信基站和云端控制系统。不同设备之间的通信需要依靠射频无线连接技术,而道路状况复杂多变,连接质量关乎整个道路系统的安全运作,因此对于通信技术的时延和可靠性的要求极高。

图1:C-V2X(图源:Qorvo官网)
车联网无线通信技术有DSRC(IEEE 802.11p)和C-V2X两种。DSRC在短距通信的延迟更低,而C-V2X的带宽更高、传输距离更长。近年来在3GPP的推动下,C-V2X在近距离场景中的性能不断增强,而DSRC却注定无法解锁远距离通信的场景,因此C-V2X逐渐成为了车联网的事实标准。

图2:C-V2X发展历程(图源:3GPP)
早在2015年,3GPP就开始在Release 14上加入V2X标准研究;并逐渐在后续的标准迭代中确立了V2X的分类、主要应用场景和技术规范。在去年6月份,Release17宣布冻结。R17特别针对短距通讯场景进行了增强,在设备与设备之间直接通讯(D2D)上扩充新的侧链(Sidelink)功能,通过PC5接口直接实现V2V/V2I的通信。接下来R17虽然还会有些细节的能效改善,但车联网标准制定已完成最主要的部分,未来车联网的加速商业化将是发展重点。
车联网下一阶段:迈向大规模商用
R16确定之后,车路协同在技术路线上标准和规范都已经确立。接下来在产业发展的初期阶段,要大力建设车联网基础设施,同时也要有相应的法规松绑和调整。我国已经将车联网列入了十四五发展重点,目前在各省市也纷纷划定出了试点区。
实现车联网的大规模普及,需要在四个层面上积极推进。硬件层面,提高路侧设备和车载设备的渗透率,尤其是路侧通信单元的基建投入。用户层面,要提高公众的感知度。生态层面,跨部门跨行业的协同合作要继续加强。商业层面,要持续进行商业模式探索,挖掘经济效益,实现正向价值的循环。一个重要的逻辑是,要使V2X真正发挥作用,就需要实现大规模应用,行业内渗透率越高,其发挥的作用和准确性也会越高。

图3:2023 CES的隧洞乘运服务(图源:The Boring Company官网)
目前R17已经冻结,R18的预研也已经开始。着眼未来出行场景的要求,车联网的技术发展呈现四个趋势。第一,支持频率纬度的扩展使用,支持毫米波及非授权频谱应用。第二,节电方式的直通通信的发展。第三,直通通信的定位和同步技术继续演进。第四,ADAS与C-V2X实现跨域融合。

图4:V2X大规模部署时间线(图源:5GAA)
V2X芯片选型:一切为了连接质量
在车载通信单元(OBU)和路侧通信单元(RSU)的BOM成本中,C-V2X芯片组的价值占到了一半,这部分主要由通信芯片厂商提供,而剩下的一半芯片价值,则是传统芯片厂商所擅长的领域。C-V2X芯片组虽然价值高,但芯片选择较少,更容易进行器件对比。而其余的芯片种类多、选择多,在选型上的难度则更高。
在此,我们为大家推荐几款有特色的车联网应用半导体器件。
在V2X应用处理器的选择上,可以考虑NXP Semiconductors的i.MX 8X应用处理器。该处理器内部集成了多达4个Arm Cortex-A35内核、用于实时处理的Arm Cortex-M4F内核以及集成式Cadence Tensilica HiFi DSP,适用于车辆远程信息处理、V2X、宽带调制解调器和网关的解决方案。结合NXP的RoadLink SAF5400 DSRC,可以构建距离的V2I和V2P应用。我们推荐的具体产品型号在贸泽电子的料号为MIMX8DX2AVOFZAC。

图5:i.MX8XL V2X方案(图源:NXP)
V2X系统需要实现高性能可靠的无线传输,则对射频天线、连接器等提出了更高的要求。而Molex是目前唯一一家能够结合无线和有线车辆通信解决方案专业知识的一级供应商,为汽车行业提供从云到传感器再到后端的完整端到端系统。
在V2X车载单元(OBU)的天线选择上,我们推荐Molex的多集线器5合1天线。该天线内置2个蜂窝(LTE、5G)MIMO集线器、2个Wi-Fi(三频段)集线器和GPS功能,因此可以覆盖LTE-V2X、SDRC协议或5G-V2X的应用频段。
自动驾驶和V2X的跨域融合将会是未来的技术趋势,在这种应用场景中,多天线的方案是更符合应用需求的。Molex的多集线器5合1天线结合多个WiFi、5G天线和导航GNSS,能够给自动驾驶汽车获取大量、多类型的数据提供足够的带宽支持。
此外,该天线采用薄型设计,易于安装,同时达到了IP67防护等级,非常适合用于商用车辆的无线应用。该天线属于Molex的新产品,目前在贸泽电子有售,具体料号为216589-1000。
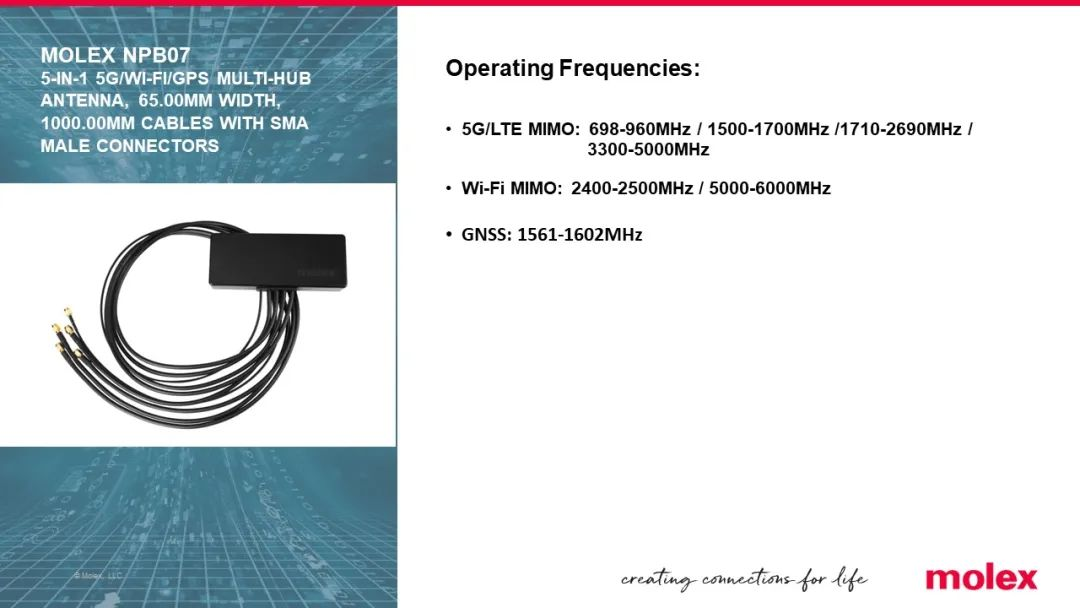
图6:Molex 5合1天线(图源:Molex)
在路侧通信单元(RSU)的射频连接器选择上,我们推荐同样来自Molex的SMP-MAX和SMP-MAX EVO 50Ω射频连接器。这是一款板对板和板对滤波器的射频连接器,具有直流至10GHz的宽工作频率范围。在2.7GHz时的额定功率高达300W以上,可为射频放大器提供出色的性能。
据悉,SMP-MAX(EVO)的阻抗匹配绝缘体经过了优化,即使在插入存在间隙(2.4mm)的情况下,也可以确保信号完整性。Molex的专利技术提高了额外的未对准裕量,可实现简单可靠的连接,即使在盲插应用中也是如此。漏斗形设计可防止因未对准而导致的额外应力,并提高可靠性。
该射频连接器适合用于各种电信和网络应用,包括基站、无线电头、中继器和系统模块等。我们推荐的具体产品型号在贸泽电子的料号是73420-0393。

图7:Molex SMP-MAX连接器(图源:Molex)
V2X系统在车内和其他系统的连接,离不开高速稳定的车载以太网,以太网PHY在其中起到了数据发送和接收的作用。在这类芯片的选择上,可以考虑NXP的TJA110x汽车以太网PHY,该芯片是符合100BASE-T1标准的双端口PHY,仅通过两根非屏蔽双绞线即可提供100Mbit/s的发送/接收能力,并支持长达15m的电缆。TJA110x PHY还针对汽车应用进行了多项优化,支持低功耗模式,并且满足汽车AEC-Q100标准。我们推荐的具体产品型号在贸泽电子的料号为TJA1101AHN/0Z。
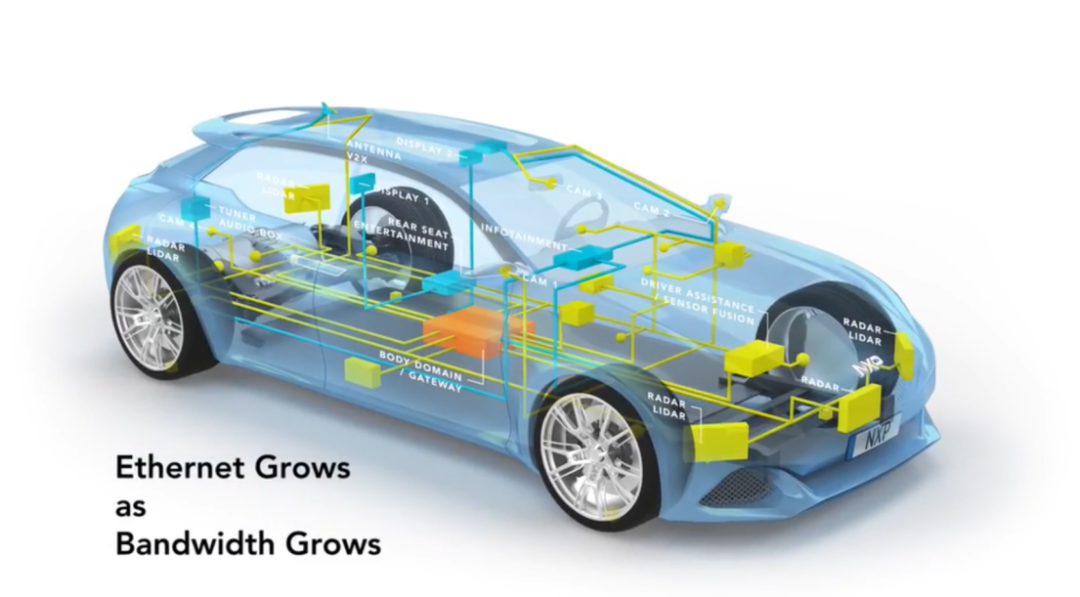
图8:车内互连网络(图源:NXP)
要实现可靠的系统,还必须实现可靠的有线连接。而在汽车连接器方面,Molex Mini50连接系统具有明显的空间优势。据悉,Molex Mini50与传统的USCAR 0.64mm连接器相比,可节省50%的空间。该系列采用密封或未密封的Mini50单排和双排插座,其小型端子可适应运输车辆内部环境中的更多小电流电路,例如车载摄像头、传感器、仪表等等连接场景。
我们推荐的产品是Molex的Mini50家族的CTX50系列端子线夹。该系列产品能够在保持强度的同时减小线规尺寸,推荐的具体产品型号在贸泽电子的料号为560023-0450。

图9:Molex CTX50端子线夹(图源:Molex)
结语
随着Release17的冻结,Release 18的预研也已经展开。着眼未来,C-V2X技术将会向着节电直通通信、频率纬度扩展、定位和同步精度提升等方向继续发展。
作为车联网的关键通信技术,C-V2X将会在智慧出行的产业需求引导下,与自动驾驶、边缘计算和数字孪生等技术进行深度融合,进入一个可迭代、可拓展、可闭环的高速发展路径。
本文转载自: 贸泽电子微信公众号
导语
全球新一轮科技和产业革命正悄悄来临,电动化、网联化、智能化、共享化成为汽车产业的发展潮流和趋势。在汽车新四化的推动之下,vwin网站 电气架构从原来的分布式逐渐向跨域集中式和车辆集中式不断演进,vwin网站 软件架构不断升级,软件与硬件分层解耦,软件定义汽车的时代即将到来。汽车智能化跑出加速度,中国的新能源车市场向好,ADAS功能搭载率不断攀升,L2正在成为标配,L3开始量产上车。
汽车智能化趋势下,功能安全成为行业关注焦点
随着汽车智能化的推进以及自动驾驶技术创新的日新月异,安全成为行业不约而同的关注焦点。安全分为两种,一种是本质安全,另一种是功能安全。本质安全是通过消除危险原因来确保安全的方法;而功能安全是通过功能方面的努力将风险降低到可接受水平来确保安全的方法。本质安全可以确保绝对的安全性,但是成本往往很高;相比之下,功能安全的成本较低,但在设计时必须考虑到当附加的功能发生故障时应如何确保安全。
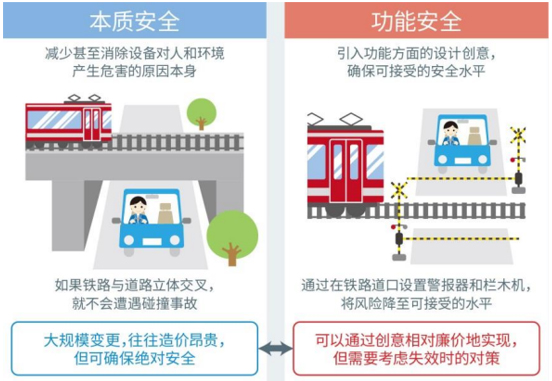
图 | 本质安全与功能安全的思路
举个例子,在铁路和道路交叉口,如果采用建立交桥的方法将铁路和道路分开,从物理上避免火车和汽车碰撞的方法,这是一种本质安全的思路。而如果通过在道路与铁路的交叉处设置警报器和栏杆,在铁路上安装传感器,当传感器检测到火车接近时,警报器响起,并降下栏杆,当另外的传感器检测到火车已经通过时,警报器停止,并升起栏杆,虽然道路与铁路在物理上仍然交叉,但可通过设置铁路道口的方法将汽车和火车相撞的风险降低到可接受的水平,这就是功能安全的思路。当然,在这个案例中,如果传感器损坏,那么在火车接近时,警报器和栏杆就不会工作,这是一种“危险”状态,因此就需要加入传感器的自我诊断或者双传感器的冗余设计,来确保即使传感器损坏也不会引发危险状态的设计,这就是故障安全(Fail Safe)的思路。
由此可知,功能安全其实就是基于“人会犯错”、“东西会损坏”思路之下的一种设计,而功能安全通常要同时考虑到“系统性故障”和“随机性故障”这两方面,来确保没有系统性的Bug,以及当随机性故障发生时不会对人造成伤害。在中国,ISO 26262(功能安全)已纳入推荐性国家标准,ISO 26262的第一版中文译本GB/T 34590已于2018年5月起开始施行。
当然,不止汽车领域有这个要求,很多工业场景同样对安全性要求非常高。为了构建更安全的系统,必须在设备开发过程中就要考虑到在发生问题时如何确保安全,这意味着故障安全和功能安全是贯穿设备开发全流程的。
复位IC为汽车和工业用设备安全保驾护航
讲到汽车和工业应用场景对设备安全性的需求,就不得不提到对系统电源电压进行监控的重要性,而复位IC是电压监控电路中不可或缺的产品之一,目前已经广泛应用于EV/HEV逆变器、引擎控制单元、ADAS、汽车导航系统、汽车空调、FA设备、计量仪器、伺服系统、各种传感器系统等需要对电子电路进行电压监控的各种车载和工业设备应用中。
面向该市场需求,罗姆推出了1000多种复位IC,2021年度,在低电压范围的广泛应用领域,创造了2.5亿枚的年出货量记录。就在近期,罗姆还开发出了一款高精度、超低功耗且支持40V电压的窗口型复位IC “BD48HW0G-C”。
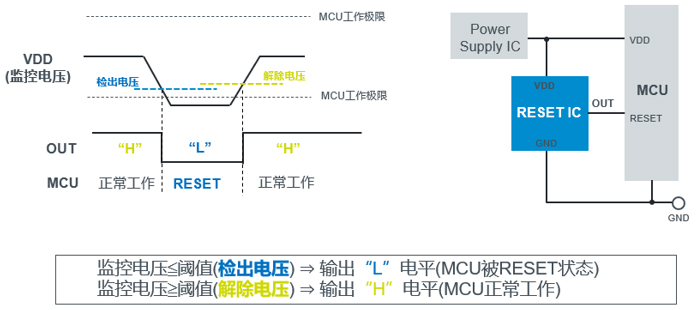
图 | 复位IC工作示例
那么什么是复位IC呢?复位IC是一种开关IC,可用于电子电路的电压监控,当检测到被监控的电压超过阈值时就会通过改变输出而达到复位操作的效果,因此具有通过与微控制器合作来确保系统安全的作用。就好比河里的水位报警器,当河水漫过最高警戒线或低于最低警戒线时都要拉响警报,并触发放水或蓄水动作,而这里的水位传感器就好比电路中的复位IC,起到的效果是一样的。
罗姆新推的复位IC “BD48HW0G-C”有何特别之处?
同样是复位IC,为什么要有这么多类型?罗姆最新推出的复位IC “BD48HW0G-C”又有什么特色或优势呢?由于应用场景的不同,系统电路对复位IC精度、功耗、工作电压、功能安全、监控电压范围、欠压/过压检测等需求都不一样,因此需要开发出不同的复位IC来匹配相应的市场需求。
罗姆窗口型复位IC产品阵容
可灵活设置检测电压的电压检测器 (复位IC)
| 产品名称 | 数据表 | 工作电压 (V) | 电压检测精度 Ta=整个温度范围 (%) | 过电压 检测 (V) | 低电压 检测 (V) | 输出形式 | 静态电流 (nA) | 迟滞 电压 (V) | “L”输出电流(mA) | 复位解除 传输延迟时间 (us) | 工作温度 (℃) | 封装 | ComfySIL™ 功能安全 类别* | 支持车载 AEC-Q100 | ||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| VDD=1.6V | VDD=1.8V | VDD=2.4V | ||||||||||||||
 BD48HW0G-C | 1.8 to 40 | ±0.75 | 1.277 | 1.277 | Open Drain | 500 | VDET×0.01 | - | 2 | - | 17 | -40 to +125 | SSOP6 | FS supportive | YES | |
| BD48W00G-C | 1.6 to 6.0 | ±2.5 | 1.20 | 1.20 | 3,000 | 1 | - | 2 | 30 | SSOP6 | FS supportive | YES | ||||
可灵活设置延迟时间的电压检测器 (复位IC)
| 产品名称 | 数据表 | 工作电压 (V) | 电压检测精度 Ta=整个温度范围 (%) | 过电压 检测 (V) | 低电压 检测 (V) | 输出形式 | 静态电流 (nA) | 迟滞 电压 (V) | “L”输出电流(mA) | 复位解除 传输延迟时间 (us) | 工作温度 (℃) | 封装 | ComfySIL™ 功能安全 类别* | 支持车载 AEC-Q100 | ||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| VDD=1.6V | VDD=1.8V | VDD=2.4V | ||||||||||||||
BD52W01G-C | 1.6 to 6.0 | ±5 | 1.32 | 1.08 | Open Drain | 300 | VDET×0.01 | 1 | 2 | Adj | ±50 (整个温度范围) | -40 to +125 | SSOP6 | FS supportive | YES | |
| ☆ BD52W02G-C | 1.65 | 1.35 | SSOP6 | FS supportive | YES | |||||||||||
BD52W03G-C | 1.98 | 1.62 | SSOP6 | FS supportive | YES | |||||||||||
| ☆ BD52W04G-C | 2.75 | 2.25 | SSOP6 | FS supportive | YES | |||||||||||
BD52W05G-C | 3.63 | 2.97 | SSOP6 | FS supportive | YES | |||||||||||
| ☆ BD52W06G-C | 5.50 | 4.50 | SSOP6 | FS supportive | YES | |||||||||||
NANO标记产品为搭载Nano Energy™超低静态电流技术的产品。
* FS supportive: 表示这是面向车载领域开发的IC,支持与功能安全相关的安全性分析。
罗姆最新推出的复位IC “BD48HW0G-C”是一款支持40V电压的窗口型复位IC,由于采用了高耐压的BiCDMOS工艺,并融合了罗姆所擅长的模拟设计技术,BD48HW0G-C工作电压范围宽至1.8V~40V可调。关于窗口型的设计,由于BD48HW0G-C配有2个独立的基准电压电路,因此可以灵活地设置High侧和Low侧的检测电压,并独立复位检测输出。在检测精度方面,BD48HW0G-C在-40℃-+125℃温度范围内可实现业界先进的±0.75%电压检测精度,高于业界标准产品的精度±2.2%。在功耗方面,BD48HW0G-C的静态电流只有500nA,仅为普通的工作电压24V以上的窗口型复位IC的1/16,这使得工程师在设计电路时无需担心因复位电路而产生的功耗增加。
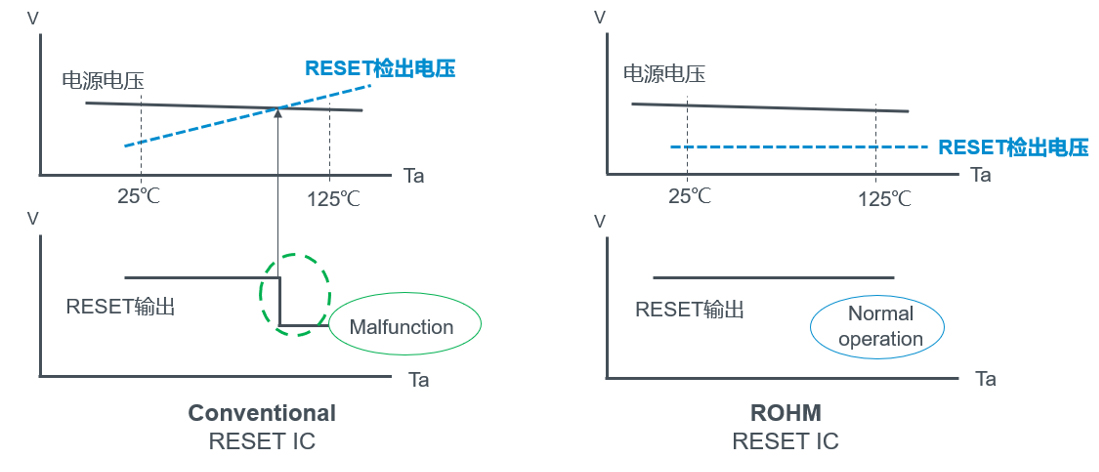
图 | 在全动作温度范围内的高精度复位IC更易于系统设计
为何在车载和工业领域需要强调在全动作温度范围内的、稳定的高精度特性呢?我们知道,如果只是在25℃下有值偏离的问题,那么可以通过固定补偿进行调整,比较容易实现。但是在汽车和工业应用中,环境温度以及机身自身发热和散热的情况差别较大,电源电压和复位检出电压受温度的影响会产生波动,这种受温度影响下的偏离是非常难修正的,因此对于车载和工业环境,选择全动作温度范围内的、稳定的高精度复位IC更易于系统设计,从而减轻客户的设计负担。此外,在车载和工业环境下,通常环境噪声较大,当外部噪声侵入时,如果检测出电压的精度差,那么容易发生误动作,因此为了避免或减少外部噪声的影响,提高系统运行的可靠性,高精度复位IC是更好的选择。
值得一提的是,罗姆从2015年就已经开始构建ISO 26262的流程,并在约2年半后的2018年3月,通过德国第三方认证机构TÜV Rheinland获得了ISO 26262的流程认证。正因为对ISO 26262规格以及应用电路有着高度理解,罗姆针对需要功能性安全的车载和工控电源,开发了支持从低到高的广泛电压范围的、高精度地检测电压异常的复位IC。
实现模拟电源器件超低功耗的秘密:Nano Energy™
前面提到,BD48HW0G-C的静态电流只有500nA,仅为普通的工作电压24V以上的窗口型复位IC的1/16,如此超低功耗是如何实现的呢?
事实上,罗姆采用的是IDM的模式,在这种垂直统合型生产体制下,罗姆在“电路设计”、“布局”和“工艺”这三方面都具有更深的经验累积和更强的模拟技术优势。基于此,罗姆研发出了超轻负载状态下彻底削减消耗电流的划时代技术“Nano Energy™”。 使用该技术,无负载时的静态电流可低至纳安(nA)量级,不仅可以延长电池供电的物联网设备和移动设备的驱动时间,还有助于不希望增加功耗的车载和工业设备的高效率工作。
举个例子,我们知道,新能源汽车是实现全球“双碳计划”的重要组成部分,对于EV/HEV来讲,提高燃油经济性,增加行驶里程势在必行,于是低功耗化就会变得尤为重要。其次,当汽车怠速熄火时,发动机会停止运转,电池将提供功能所需的电力。再者,当在停车时,时钟在后台运转、报警系统开启、无钥匙系统开启等都将直接由电池供电,存在电池耗尽的风险。因此,进一步降低电源IC的电流消耗是刚需,而通过搭载Nano Energy™技术,可以为整个汽车系统的低功耗做贡献。此外,低静态电流带来的不只有延长电池供电设备寿命一个好处,同时对于汽车和工业应用来说,还能减少电路中的暗电流,有助于EMC的改善。更多详情:https://www.rohm.com.cn/support/nano
写在最后
沿着自动驾驶产业链,L2级别的自动驾驶渗透率不断提升,L3级别的自动驾驶开始落地,新能源汽车市场已经从政策驱动转向市场拉动。这意味着vwin网站 系统越来越复杂,对汽车功能安全的需求度也越来越高。罗姆作为vwin网站 领域的深耕者,将通过符合功能安全的理念、技术、产品、方案和客户服务,为提升全球汽车安全性做出贡献。
本文转载自: 贸泽电子微信公众号
自动驾驶汽车是一种能够感知环境并在无人参与的情况下运行的车辆,它能做有经验的人类驾驶员所做的一切。在最近的一项研究中,专家们确定了自动驾驶汽车的三种发展趋势,即车辆的自动化、电气化和共享化。如果这“三化”同时作用,将释放自动驾驶汽车的全部潜力,预计到2050年,将引发城市交通的第三次革命,届时交通拥堵将得到极大缓解,运输成本将降低40%,全球城市二氧化碳排放量减少80%。
自动驾驶的6个等级
对于许多人来说,自动驾驶或无人驾驶是一项复杂而有争议的技术,对“无人化”的理解也有较大差异。为此,美国汽车工程师学会(SAE)定义了6个无人驾驶等级,包括从L0级(完全手动)到L5级(完全自动)。目前,这些无人驾驶等级准则已经被美国交通部采纳。业界也普遍接受这6个等级划分。
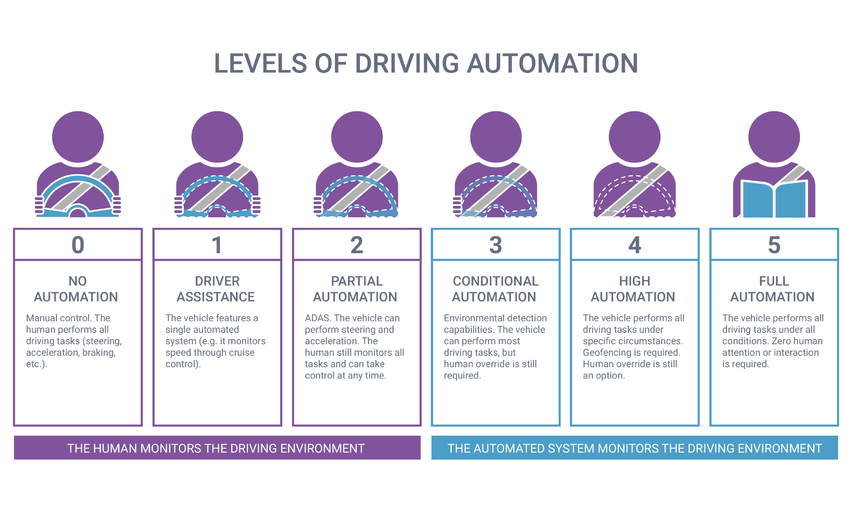
图1:自动驾驶的6个等级(图源:Synopsys)
L0级(无自动驾驶)
在当今道路上行驶的大多数汽车都属于L0级,这种手动控制的车辆全部由人类驾驶员完成动态驾驶任务,尽管其中可能有相应的系统来辅助驾驶员,例如紧急制动系统,但从技术上讲,该辅助系统并未主动“驱动”车辆。
L1级(驾驶员辅助)
这是自动化的最低级别。车辆具有单独的自动化驾驶员辅助系统,例如转向或加速(巡航控制)。人类驾驶员负责与操作汽车相关的所有任务,包括加速、转向、制动和监控周围环境。
L2级(部分自动驾驶)
在这个级别上,汽车中的自动化系统可以辅助转向和加速,而驾驶员仍然负责大部分安全关键功能和环境监控。车辆配备有高级驾驶员辅助系统(ADAS),能够控制转向以及加速或减速。目前,L2级是道路上最常见的自动驾驶汽车。特斯拉的 Autopilot 和凯迪拉克的(通用汽车)Super Cruise 系统都符合 L2级标准。
L3级(受条件制约的自动驾驶)
从L3级开始,汽车本身利用自动车辆传感器监测环境,并执行其他动态驾驶任务,如制动。如果在驾驶过程中出现系统故障或其他意外情况,驾驶员必须做好干预准备。从技术角度来看,从L2级到 L3级实现了重大飞跃,但从驾驶人员的角度来看,差别算不上太明显。奥迪公司曾将2019年入市的奥迪A8L定义为L3 级自动驾驶,车辆采用Traffic Jam Pilot技术,该技术结合了激光雷达以及先进的传感器融合技术和处理能力。但根据美国对自动驾驶汽车的监管程序,目前奥迪A8L在美国仍被归类为L2级自动驾驶汽车。
L4级(高度自动驾驶)
L4级与高度自动化相关,即使在极端情况下,汽车也能够在不受驾驶员干预的情况下完成整个行程。但是,也有一些限制:只有当系统检测到交通状况安全且没有交通堵塞时,驾驶员才能将车辆切换到该模式。L3级和L4级自动化之间的关键区别在于,如果发生意外或系统失效,L4级自动驾驶汽车可以进行干预。虽然L4级自动驾驶汽车可以采用无人驾驶模式运行,但由于立法和基础设施发展欠缺,L4级无人驾驶汽车只能在限定区域行驶,这被称之为地理围栏(Geofencing)。
L5级(完全自动驾驶)
L5级自动驾驶汽车将没有任何人为控制的规定,甚至没有方向盘或加速/制动踏板。他们将不受地理围栏限制,能够去任何地方并完成任何有经验的人类驾驶员可以完成的操控。全自动驾驶汽车尚不存在,但汽车制造商正在努力实现L5级自动驾驶,目前只是在几个试点区进行测试。
未来可期的自动驾驶市场
自动驾驶已经不再是一件新鲜事务,研究人员预测,到 2025 年,我们将看到大约800万辆无人或半无人汽车在路上行驶。Fortune Business Insights在其《2021-2028年自动驾驶汽车市场》的报告中表示,传感器处理技术、自适应算法、高清晰度映射以及车辆到基础设施(V2I)和车辆到车辆(V2V)通信技术的快速发展,让许多公司放心扩大其制造和研发能力,并将车辆自动化提升到更高的水平。2020年,全球自动驾驶汽车市场规模约为14.5亿美元。预计在2021-2028年间,市场将从2021年的16.4亿美元增长到2028年的110.3亿美元,年均复合增长率为31.3%。
市场调研机构Mordor intelligence认为,由于越来越严格的政府法规侧重于提高道路安全,更多的自动驾驶汽车正在开发中,它们采用了与智能手机集成的先进技术,为市场参与者创造了吸引客户的机会。人工智能、机器学习以及雷达、激光雷达、GPS和计算机视觉等其他传感器领域的最新技术进步,使制造商能够有效提高汽车的自动驾驶能力。目前,L2级和L3级自动驾驶汽车在市场上最为突出,而L4级和L5级预计将在2030年获得更广泛的认可。因此,预计在预测期内,这些L2级和L3级车的增长将是市场的主要推手。因此,自2022年到2027年这5年间,自动驾驶汽车市场的复合年增长率将达到22.75%。
随着ADAS和安全功能的越来越多采用、政府对提高车辆和行人安全的关注以及汽车制造企业提供先进安全功能的意愿,多方合力,将刺激市场对自动驾驶汽车的需求。根据Markets and Markets发布的最新市场研究报告,全球自动驾驶汽车的市场规模预计将从2021年的2030万辆增长到2030年的6240万辆,年复合增长率为13.3%。
根据福特、本田、丰田、沃尔沃等汽车制造商的公开声明,目前,自动驾驶汽车市场仍以L2级车辆为主,到2030年,全球自动驾驶车辆的总注册份额将达到12%。
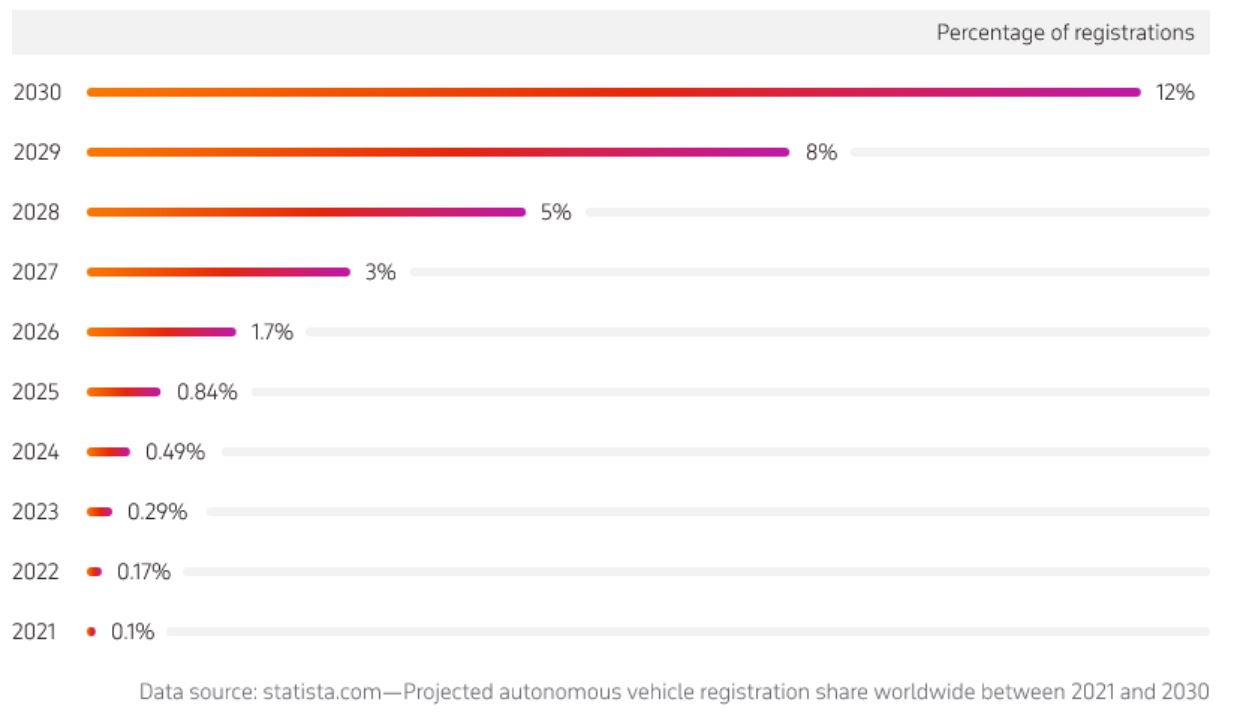
图2:到2030年,全球自动驾驶车辆的总注册份额将达到12%(图源:Statista.com)
自动驾驶中的3种重要传感器
要想充分理解车辆的自动化水平就要先了解自动驾驶汽车是如何工作的。总体来看,自动驾驶汽车主要依靠传感器、执行器、复杂算法、机器学习系统和强大的处理器来运行软件并执行自动化操作。
具体来看,自动驾驶汽车主要基于位于车辆不同部位的各种传感器,创建并维护其周围环境的地图。如今,大多数汽车制造商在自动驾驶汽车中最常使用的传感器有三种,即:摄像头(camera)、雷达(radar)和激光雷达(Lidar)。
其中,雷达传感器负责监测附近车辆的位置。摄像头用来探测交通信号灯、阅读路标、追踪其他车辆,并寻找行人。激光雷达传感器将光脉冲反射到汽车周围,以测量距离、检测道路边缘并识别车道标记。停车时,车轮上的超声波传感器会检测路缘和其他车辆。然后,大量的软件会处理所有这些“感官”输入,绘制路径,并向汽车的执行器发送指令,由执行器控制车辆的加速、制动和转向。此外,通过自动驾驶汽车中的传感器收集的信息,如前方的实际路径、交通堵塞和道路上的任何障碍物,也可以在通过M2M技术连接的汽车之间共享,这就是车联网中的车对车(V2V)通信,它对驾驶自动化非常有用。可以这样说,如果没有传感器,自动驾驶是不可能实现的。
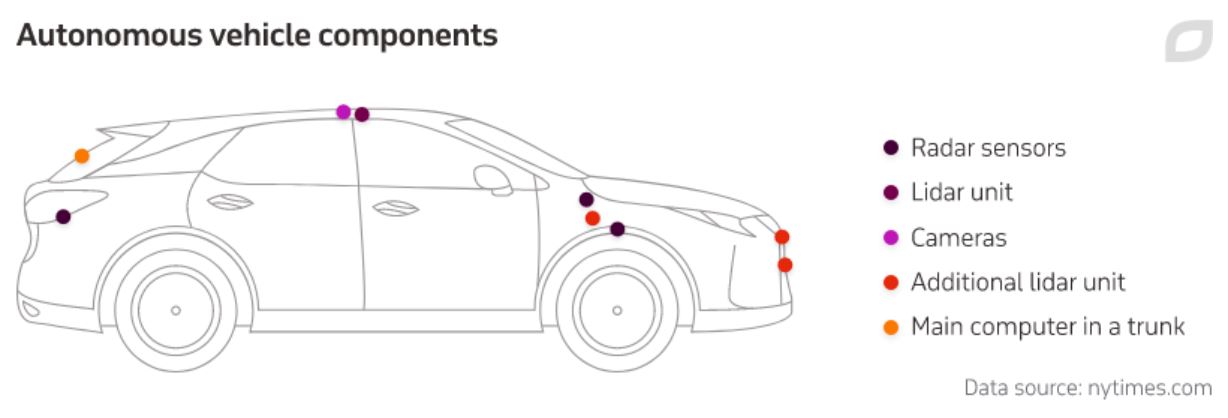
图3:自动驾驶汽车中三种最重要的传感器(图源:nytimes.com)
1. 摄像头传感器
自动驾驶汽车通常都会配有视觉摄像头,它也是最直观的传感器,其工作原理与我们的眼睛类似。摄像头传感器具备检测RGB颜色信息的能力,可提供百万像素的分辨率,这两大特性相结合,使其成为“阅读”交通标志和其他应用不可或缺的设备。通过在各个角度为车辆配备这些摄像头,车辆能够保持其外部环境的360°视图,摄像头可以产生与人类驾驶员非常相似的自动驾驶体验。如今,摄像头已经成为ADAS最重要的组成部分,并得到广泛的部署。
正在兴起的3D摄像头可以用来显示非常详细和逼真的图像。这些图像传感器自动检测物体,对其进行分类,并确定它们与车辆之间的距离。例如,摄像头可以轻松识别其他车辆、行人、骑自行车者、交通标志和信号、道路标记、桥梁和护栏。
■ 与其他类型的传感器相比,摄像头不仅视图直观且价格相对便宜。这一优势使得原始设备制造商在没有太大成本压力下将更好的自动驾驶功能引入到中档甚至低端车辆中。
■ 摄像头传感器的缺点:在恶劣的天气条件下,如雨、雾或雪,会使摄像头无法清晰地看到道路上的障碍物,从而增加发生事故的可能性。此外,在很多情况下,来自摄像头的图像根本不足以让计算机对汽车应该做什么做出正确的决定。例如,在物体的颜色与背景非常相似或它们之间的对比度很低的情况下,算法可能会失败。
2. 雷达传感器
雷达是在第二次世界大战之前发明的,从那时起被广泛用于精确跟踪飞机和船只的位置、速度和方向。1999年,梅赛德斯-奔驰(Mercedes-Benz)首次将其引入到汽车中以支持其自适应速度功能。雷达传感器对自动驾驶的整体功能起着至关重要的作用,它们发出无线电波,检测物体,并实时测量它们与车辆的距离和速度。短程和远程雷达传感器通常都部署在车的四周,每个传感器都有不同的功能。虽然短程(24GHz)雷达应用能够实现盲点监控、理想的车道保持辅助和停车辅助,但远程(77GHz)雷达传感器的作用包括自动距离控制和制动辅助。
■ 雷达的优点:雷达发射的无线电波在传输时几乎不受能见度、光线和噪音的影响,其性能在所有环境条件下都是一致的,哪怕在雾天或雨天识别物体时通常也没有问题。这是它与摄像头和激光雷达的显著不同点。
■ 雷达传感器的缺点:雷达的主要弱点一是无法捕获颜色信息,二是与摄像头和激光雷达传感器相比,其角度分辨率也比较有限,即在模拟物体的精确形状方面相对较弱。如今车辆上使用的汽车雷达传感器只能正确识别90%到95%的行人,不能确保道路的安全性。此外,仍然广泛使用的2D雷达无法准确确定物体的高度,因为传感器只能水平扫描,这可能会导致在桥下或路标下行驶时出现各种问题。为了解决这些问题,目前传感器企业正在加紧开发更多种类的3D雷达传感器甚至4D成像传感器。
3. 激光雷达传感器
激光雷达传感器的工作原理与雷达类似,唯一的区别是它们使用激光而不是无线电波。除了测量到道路上各种物体的距离外,激光雷达还允许创建检测到的物体的三维图像,并绘制周围环境的地图。此外,激光雷达可以配置为在车辆周围创建完整的360°地图。这两个优势也是谷歌、丰田等自动驾驶汽车制造商选择激光雷达的主要原因。
■ 激光雷达的优点:高清晰度3D建模。激光雷达可以看作是一种更先进的雷达,它的探测范围最远可达100米,计算误差不到两厘米。因此,它能够在任何时刻测量数千个点,从而对周围环境进行非常精确的3D描绘。与雷达一样,激光雷达的效能同样不受环境条件的影响。
■ 激光雷达的缺点:技术复杂且价格昂贵。为了提供精确的环境三维模型,激光雷达每秒计算数十万个点,并将它们转换为动作。这意味着与摄像头和雷达相比,激光雷达需要大量的计算能力。这也使得激光雷达容易出现系统故障和软件故障。成本高是激光雷达的另一短板,它比用于自动驾驶车辆的雷达传感器要昂贵得多。
为自动驾驶车辆选择正确的传感器
摄像头、雷达、激光雷达,这三种传感器各有优缺点。因此,大多数原始设备制造商常常使用三者中至少两个的组合,以相互补充,弥补不足。当结合使用时,传感器技术可以让车辆在几乎不需要人工干预的情况下安全行驶。随着传感器技术的日益成熟,预计未来五年将有越来越多的车辆达到L3--L4级的自动驾驶水平。
作为工程师和设计师,需要仔细考虑每种传感器类型的作用、能力和局限性,以确定这些传感器的正确组合能够满足最终用户在安全性、功能性能和价格方面的需求。
高分辨率数码摄像头帮助车辆“看到”周围的环境,当多个摄像头安装在车辆周围时,360°视图允许车辆检测其附近的物体,如其他车辆、行人、道路标记和交通标志。常用的摄像头传感器包括近红外摄像头(NIR)、VIS摄像头、热摄像头和飞行时间摄像头(ToF)。与大多数传感器一样,摄像头在相互补充时工作得最好。如今的汽车后部和360°视觉图像系统通常采用集中式架构。这意味着中央控制单元处理四到六个摄像头的原始数据。由于处理是在软件中完成的,对处理器也会有苛刻的要求。2D和3D相机都需要图像传感器,并要求其动态范围超过130dB。这种高动态范围是提供清晰图像的必备需求,目前市面上最好的图像传感器的动态范围已经达到140dB。
安森美(onsemi)AR0820AT 830万像素 CMOS数字图像传感器针对微光和高动态范围场景进行了优化,安森美半导体的 AR0820AT 是一款 1/2 英寸 CMOS 数字图像传感器,具有2.1微米DR-Pix BSI像素和片上140 dB HDR捕获能力。
该传感器包含的先进功能还有像素内分选、开窗以及视频和单帧模式,以提供灵活的感兴趣区域(ROI),适用于低光度和具有挑战性的高动态范围场景。先进的晶圆堆叠技术更是实现了低功耗和紧凑的封装设计。此外,AR0820AT满足欧洲NCAP 2020等ADAS系统相关标准的能力还解决了安全性问题。AutoX是中国首家在公共道路上运营全无人驾驶的RoboTaxi服务的公司,在其解决方案中使用了28个安森美半导体的图像传感器。
图4:AR0820AT CMOS数字图像传感器(图源:onsemi)
事故统计数据显示,76%的事故完全是由人为失误造成的。在所有案例中,94%涉及人为错误。雷达传感器是现代汽车中高级驾驶员辅助系统(ADAS)不可或缺的一部分。雷达传感器不仅对于自动驾驶汽车尤为重要,它们还能有效提高驾驶员的安全性和舒适性。目前的雷达系统要么基于24 GHz,要么基于77 GHz。77GHz的优势主要在于距离和速度测量的更高精度,以及更精确的角度分辨率。与24GHz相比,天线尺寸更小,干扰问题更低。汽车雷达传感器通常用于盲点检测(BSD)、车道变换辅助(LCA)、碰撞缓解(CM)、停车辅助(PA)和后方交叉路口警报(RCTA)功能。
英飞凌(Infineon)提供种类繁多的汽车雷达传感器,包括短程、中程和远程雷达传感器。作为XENSIV系列传感器的一部分,英飞凌拥有一系列RASIC 77/79GHz前端雷达传感器 IC,专门用于驾驶辅助系统,例如自适应巡航控制和碰撞警告。
这些RASIC解决方案能够检测和识别最远250米范围内的物体,使驾驶员辅助功能能够获得Euro NCAP(欧洲新车评估计划)的五星级评级。此外,RASIC 77/79GHz 汽车雷达支持ASIL C,减少了客户的研发工作。这些77GHz芯片可用于基于雷达的驾驶员辅助系统,能识别250米范围内的物体。作为对77/79 GHz 产品的补充,英飞凌还提供集成度非常高的24GHz雷达收发器系列,与分立产品系列相比,能节省约30%的PCB占位。
现在,英飞凌可提供一整套77/79GHz雷达芯片组,包括:雷达77/79GHz射频毫米波IC系列(RASIC RXS816xPL),具有雷达信号处理单元的MCU系列(第二代AURIX TC3xx),具有多种安全功能的雷达系统电源TLF3068x,非常紧凑的3芯片配置(RXS816xPL+AURIX TC3xx+TLF3068x),非常适于从自动紧急制动(AEB)到自动驾驶中的高分辨率雷达应用。
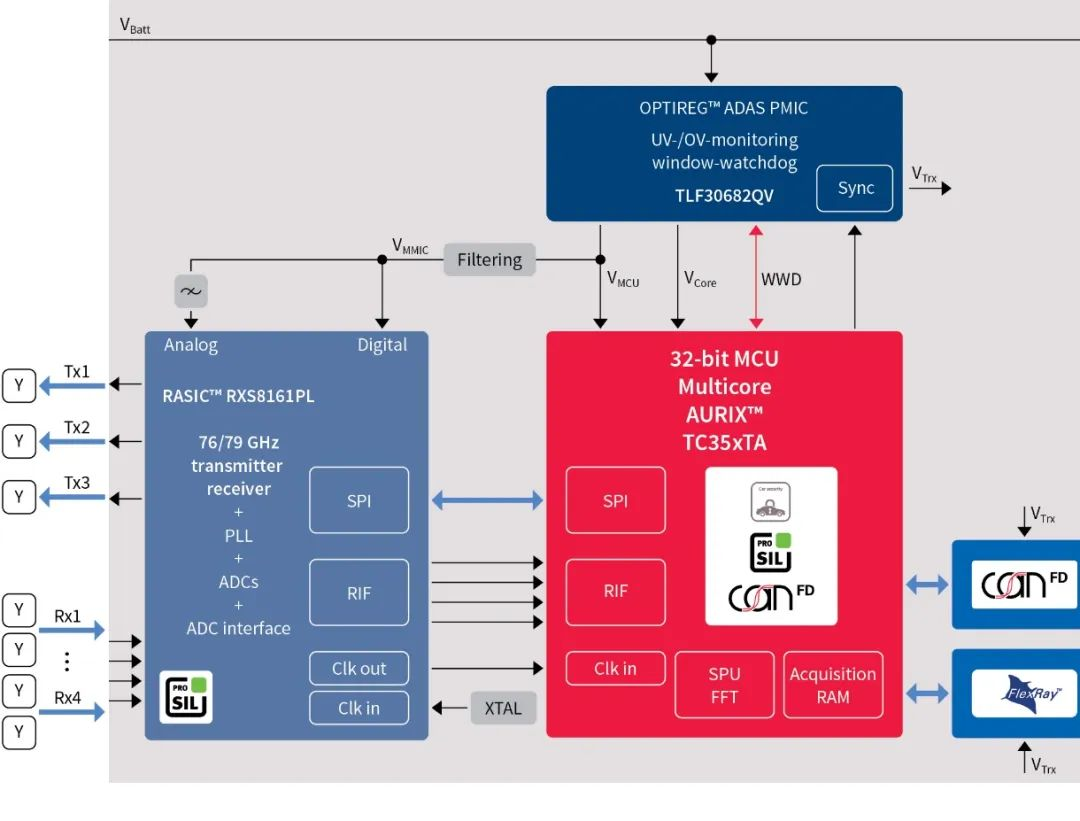
图5:英飞凌77/79GHz雷达ECU(图源:Infineon)
前文提到,无法捕获颜色信息,角度分辨率也比较有限是雷达比较明显的弱点。然而,在通向L5级汽车自动化的道路上,4D成像雷达为雷达创新创造了新的可能,在面向L2+的未来传感器组合中,它也将承担大部分工作。恩智浦(NXP)最新推出的高性能S32R45雷达处理器,为OEM提供了一条经济高效的途径,帮助他们实现先进的4D成像雷达功能,在L2+和更高级别的汽车上投入商用,具有适当的成本结构。
S32R45是一款基于Arm Cortex-A53 和Cortex-M7 内核的32位汽车雷达应用MPU,主要为民用汽车ADAS 雷达市场而设计。对于汽车ADAS雷达市场,S32R45 MPU适用于高端长距前向/后向雷达和高级雷达成像应用,并且可以用作符合新车评价规范(NCAP)的高级域控制器,以可扩展、安全可靠和高能效的方式提供高性能雷达处理。
S32R45雷达处理器是NXP第6代汽车雷达芯片组系列中的旗舰产品,与NXP TEF82xx RFCMOS收发器结合使用,可提供高角度分辨率、强大处理能力和广泛感测范围。

图6:NXP高性能S32R45雷达处理器(图源:NXP)
激光雷达主要由发射器、接收器和信号处理三部分组成,它在深度感知和确定物体存在方面非常精确。它可以远距离观察,也可以穿越恶劣的环境条件,如夜间或雨雾。因为它能识别和分类所看到的东西,所以它能分辨出松鼠和石头等物体之间的区别,并据此预测行为。按照测距原理的不同,激光雷达可以划分为飞行时间测距法(ToF)、基于相干探测的 FMCW 测距法、以及三角测距法等。目前,市场上以 ToF 为技术路线的激光雷达公司数量较多。
Lidar是ADI公司自动驾驶车辆感知检测战略的关键支柱。目前,集成在测试车辆上的传统Lidar系统价格高昂。ADI公司在真正非机械式且经济高效的Lidar技术上进行了大量投资,以促进汽车Lidar系统的采纳成为主流。ADI公司拥有丰富的高性能信号链和电源管理元件,可用于构建几乎任何Lidar系统。这些产品适用于脉冲或FMCW/连续波系统,以及构建在900 nm至1500 nm波长范围内的系统。

图7:ADI公司提供的AD-FMCLIDAR1-EBZ 开发平台助力Lidar系统的快速开发(图源:贸泽电子)
结语
根据Yole Development的报告,至少在2030年之前,L4/L5汽车的市场渗透率仍将保持在个位数,其中一部分汽车将作为机器人汽车使用。随着L0–L2汽车的市场渗透率开始下跌,L2+汽车的采用率将持续稳定增长,截止2030年,L2+汽车很可能达到将近50%的市场份额。在未来十年内,预期L2+汽车将成为汽车OEM关注的焦点。
汽车传感器是提高道路交通安全和达到L4级和L5级自动驾驶的关键。随着车辆走向完全自主驾驶,选择正确的传感器组合变得非常重要。为了获得最高级别的安全性和性能,摄像头、雷达、激光雷达之间的传感器融合将最大限度地发挥每种传感器的优势,同时弥补存在的不足。例如,单独使用激光雷达对车道跟踪的效果很差,但激光雷达和摄像头的结合在这方面非常有效。可以预见,在先进的传感器技术的加持下,通过警告信号和自动安全功能来预防事故,从而实现2050年交通事故中零死亡这一美好愿景也有望得到落实。